6.6 Frequenzgang Neben der Übertragungsfunktion G(s) zur ... - IFAT
6.6 Frequenzgang Neben der Übertragungsfunktion G(s) zur ... - IFAT
6.6 Frequenzgang Neben der Übertragungsfunktion G(s) zur ... - IFAT

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
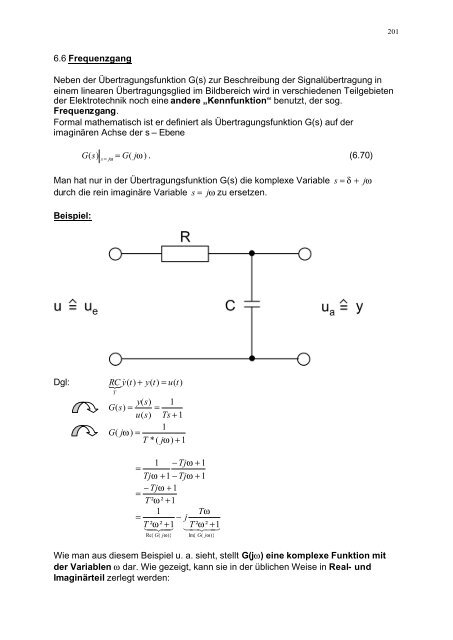
<strong>6.6</strong> <strong>Frequenzgang</strong><br />
<strong>Neben</strong> <strong>der</strong> <strong>Übertragungsfunktion</strong> G(s) <strong>zur</strong> Beschreibung <strong>der</strong> Signalübertragung in<br />
einem linearen Übertragungsglied im Bildbereich wird in verschiedenen Teilgebieten<br />
<strong>der</strong> Elektrotechnik noch eine an<strong>der</strong>e „Kennfunktion“ benutzt, <strong>der</strong> sog.<br />
<strong>Frequenzgang</strong>.<br />
Formal mathematisch ist er definiert als <strong>Übertragungsfunktion</strong> G(s) auf <strong>der</strong><br />
imaginären Achse <strong>der</strong> s – Ebene<br />
G j<br />
( s)<br />
s = ω = G(<br />
jω<br />
) . (6.70)<br />
Man hat nur in <strong>der</strong> <strong>Übertragungsfunktion</strong> G(s) die komplexe Variable s = δ + jω<br />
durch die rein imaginäre Variable s = jω<br />
zu ersetzen.<br />
Beispiel:<br />
Dgl: { y&<br />
( t)<br />
+ y(<br />
t)<br />
= u(<br />
t)<br />
RC T<br />
y(<br />
s)<br />
1<br />
G ( s)<br />
= =<br />
u(<br />
s)<br />
Ts + 1<br />
1<br />
G ( jω<br />
) =<br />
T * ( jω<br />
) + 1<br />
1 − Tjω<br />
+ 1<br />
=<br />
Tjω<br />
+ 1 − Tjω<br />
+ 1<br />
− Tjω<br />
+ 1<br />
=<br />
T ² ω ² + 1<br />
1 Tω<br />
= − j<br />
T 142<br />
² ω ² 43 + 1 1T<br />
42 ² ω²<br />
43 + 1<br />
Re{ G(<br />
jω)}<br />
Im{ G(<br />
jω)}<br />
Wie man aus diesem Beispiel u. a. sieht, stellt G(jw) eine komplexe Funktion mit<br />
<strong>der</strong> Variablen w dar. Wie gezeigt, kann sie in <strong>der</strong> üblichen Weise in Real- und<br />
Imaginärteil zerlegt werden:<br />
201
1<br />
Re{ G ( jω)}<br />
=<br />
T ² ω ² + 1<br />
Tω<br />
Im{ G ( jω)}<br />
= − .<br />
T ² ω ² + 1<br />
Natürlich kann auch die Darstellung durch Betrag und Argument gewählt werden:<br />
G ( jω<br />
) = Re²{<br />
G(<br />
jω<br />
)} + Im²{<br />
G(<br />
jω)}<br />
(6.71)<br />
=<br />
=<br />
G ( jω<br />
) =<br />
1 T ² ω²<br />
+<br />
( T ² ω ² + 1)²<br />
( T ² ω ² + 1)²<br />
1<br />
T²<br />
ω²<br />
+ 1<br />
1<br />
.<br />
T ² ω ² + 1<br />
Im{ G(<br />
jω)}<br />
argG<br />
( jω<br />
) = G(<br />
jω)<br />
= arc tan<br />
Re{ G(<br />
jω)}<br />
− Tω<br />
= arc tan<br />
1<br />
= −arc<br />
tanTω<br />
.<br />
(6.72)<br />
Für die weiter unten folgende physikalische Deutung des <strong>Frequenzgang</strong>es ist diese<br />
Darstellung durch Betrag und Argument nützlicher. Es sei bemerkt, daß man<br />
diese Darstellung des <strong>Frequenzgang</strong>es aus seiner Gleichung i. a. schneller erhält,<br />
wenn man nach dem folgenden, für das Beispiel illustriertem Muster vorgeht:<br />
1 1<br />
G ( jω<br />
) = =<br />
d. h. komplexe Zahl<br />
1 + jTω<br />
Z1<br />
Z 1<br />
=1+<br />
jTω<br />
1 1<br />
G(<br />
jω)<br />
= =<br />
Z 1+<br />
T²<br />
ω²<br />
1<br />
argG( jω<br />
) = arg1−<br />
arg Z1<br />
Tω<br />
= 0 − arc tan = −arc<br />
tanTω.<br />
1<br />
Wenn man nun die Variable ω z. B. von 0 bis ∞ laufen lässt, kann man die komplexe<br />
Funktion G(jw) in <strong>der</strong> komplexen Gauß´schen Zahlenebene bildlich darstellen.<br />
Dazu hat man entwe<strong>der</strong> punktweise<br />
o<strong>der</strong><br />
Re{ G ( jω<br />
)} , Im{ G ( jω<br />
)}<br />
G ( jω)<br />
, arg G ( jω<br />
)<br />
202
für geeignet gewählte und ausreichend viele Werte ω aus<strong>zur</strong>echnen (<br />
Wertetabelle) und die entsprechenden Punkte in <strong>der</strong> Gauß´schen Zahlenebene<br />
einzutragen. Je<strong>der</strong> dieser Punkte ist durch den zugehörigen ω - Wert zu<br />
kennzeichnen. Die Verbindung dieser Punkte liefert die sog. Ortskurve des<br />
<strong>Frequenzgang</strong>es. Für das vorliegende Beispiel erhält man z. B. einen Halbkreis im<br />
IV. Quadranten:<br />
Bild 6.8: Ortskurve des <strong>Frequenzgang</strong>es<br />
Erinnern wir uns an die formale Einführung des <strong>Frequenzgang</strong>es mit (6.70)<br />
( s)<br />
= G(<br />
jω<br />
) ,<br />
G s = jω<br />
so kann man dieses Ergebnis deuten als die Abbildung <strong>der</strong> Punkte s = jω<br />
(0 < ω < ∞) <strong>der</strong> s – Ebene – das ist die obere Hälfte <strong>der</strong> imaginären Achse <strong>der</strong> s –<br />
Ebene – vermittels <strong>der</strong> (komplexen) Funktion o<strong>der</strong> Abbildvorschrift G(s) in eine<br />
an<strong>der</strong>e komplexe G(jω) – Ebene:<br />
Bild 6.9: Zur Deutung <strong>der</strong> Abbildungsvorschrift (6.70)<br />
203
Zweifellos ist bis jetzt nicht so recht einzusehen, weshalb dieser als Spezialfall für<br />
s = jω<br />
aus <strong>der</strong> <strong>Übertragungsfunktion</strong> G(s) hervorgehende <strong>Frequenzgang</strong> eines<br />
linearen Systems (Übertragungsgliedes) eingeführt wird. Dies wird gerechtfertigt<br />
durch die große messtechnische Bedeutung des <strong>Frequenzgang</strong>es und die hohe<br />
Anschaulichkeit, die er in viele Seiten <strong>der</strong> linearen Signal- und Systemtheorie<br />
hineinzubringen vermag.<br />
Es ist nämlich noch ein ganz an<strong>der</strong>er anschaulicher Zugang zum <strong>Frequenzgang</strong><br />
G(jω) eines linearen Systems möglich, <strong>der</strong> darauf beruht, dass <strong>der</strong> <strong>Frequenzgang</strong> die<br />
stationäre Antwort des Übertragungsgliedes bei Aufschaltung harmonischer<br />
Schwingungen beschreibt.<br />
Schaltet man am Eingang eines linearen zeitinvarianten Übertragungsgliedes ein<br />
harmonisches Eingangssignal<br />
o<strong>der</strong><br />
{ } t j<br />
Uˆ<br />
ω<br />
e<br />
u(<br />
t)<br />
= Uˆ<br />
sinωt<br />
= Im<br />
(6.73)<br />
{ } t j<br />
Uˆ<br />
ω<br />
e<br />
u(<br />
t)<br />
= Uˆ<br />
cosωt<br />
= Re<br />
(6.74)<br />
auf, so stellt sich am Ausgang nach einem gewissen Übergangsvorgang wie<strong>der</strong> eine<br />
stationäre harmonische Schwingung gleicher Frequenz w ein, <strong>der</strong>en Amplitude<br />
und Phasenlage aber gegenüber <strong>der</strong> erregenden Eingangsschwingung i. a.<br />
verän<strong>der</strong>t sind:<br />
Bild 6.10: „Sinusantwort“ eines linearen zeitinvarianten Systems<br />
Im stationären Zustand reagiert also ein lineares zeitinvariantes Übertragungsglied<br />
auf die harmonische Eingangsschwingung<br />
mit<br />
u( t)<br />
= Uˆ<br />
sin ωt<br />
y ( t)<br />
= Yˆ<br />
sin( w t + j ) . (6.75)<br />
¥<br />
204
Wenn man dieses Experiment mit unterschiedlicher Frequenz ω durchführt, so stellt<br />
man fest, daß sich die Amplitude Y ˆ und die Phasenlage j <strong>der</strong> stationären<br />
Antwortschwingung mit <strong>der</strong> Frequenz w än<strong>der</strong>n.<br />
Gut bekannt und sehr markant ist diese Tatsache, aus Beobachtungen von<br />
Resonanzerscheinungen bei schwingungsfähigen Systemen, z.B. RLC –<br />
Netzwerken, Fe<strong>der</strong> – Masse – Schwingern usw. Bei Erregung solcher Systeme mit<br />
harmonischen Schwingungen treten in <strong>der</strong> Nähe <strong>der</strong> Resonanzfrequenz starke<br />
Amplitudenüberhöhungen Y ˆ bzw. große Amplitudenverhältnisse<br />
Yˆ<br />
Uˆ<br />
und deutliche Phasendrehungen <strong>der</strong> erzwungenen stationären Ausgangsschwingung<br />
gegenüber <strong>der</strong> erregenden Schwingung auf.<br />
Für eine gezielte Ermittlung <strong>der</strong> Frequenzabhängigkeiten des<br />
Amplitudenverhältnisses und <strong>der</strong> relativen Phasenlage benötigt man folgende<br />
Messanordnung:<br />
Bild 6.11: Zur messtechnischen Ermittlung des <strong>Frequenzgang</strong>es<br />
Das auf diese Weise experimentell ermittelbare<br />
Yˆ<br />
( ω )<br />
frequenzabhängige Amplitudenverhältnis<br />
Uˆ<br />
und die<br />
frequenzabhängige Phasendrehung ϕ (ω)<br />
hängen nun mit dem oben mathematisch eingeführten <strong>Frequenzgang</strong> G(jω) wie folgt<br />
zusammen:<br />
Yˆ<br />
( ω)<br />
= G(<br />
jω)<br />
„Amplitudengang“ (6.76)<br />
Uˆ<br />
205
ϕ( ω ) = arg G(<br />
jω).<br />
„Phasengang“. (6.77)<br />
Damit erhält <strong>der</strong> <strong>Frequenzgang</strong> G(jw) eine technische Interpretation und<br />
anschauliche Erklärung. Auf diese Weise ist es möglich, die oben als bildliche<br />
Darstellung des <strong>Frequenzgang</strong>es eingeführte Ortskurve punktweise<br />
messtechnisch zu ermitteln: Für einen bestimmten Frequenzwert ω ist die Länge<br />
des Zeigers (also <strong>der</strong> Betrag G ( jω)<br />
) durch das für diese Frequenz gemessene<br />
Amplitudenverhältnis bestimmt, und <strong>der</strong> Winkel des Zeigers <strong>zur</strong> positiven reellen<br />
Achse (also das Argument arg G(jω)) entspricht <strong>der</strong> für diese Frequenz gemessenen<br />
relativen, Phasendrehung <strong>der</strong> stationären Ausgangsschwingung gegenüber <strong>der</strong><br />
Eingangsschwingung:<br />
ˆ<br />
jargG<br />
( jω<br />
) Y(<br />
ω)<br />
jϕ(<br />
ω )<br />
G ( jω)<br />
= G(<br />
jω)<br />
e = e .<br />
(6.78)<br />
Uˆ<br />
Mit diesem physikalischen Verständnis des <strong>Frequenzgang</strong>es, das sich aus dem<br />
Übertragungsverhalten linearer Systeme für harmonische Signale im<br />
eingeschwungenen (stationären) Zustand ergibt, lassen sich nun weitere nützliche<br />
Zusammenhänge mit den an<strong>der</strong>en Formen <strong>der</strong> mathematischen Beschreibung<br />
linearer zeitinvarianter Systeme herstellen.<br />
Zunächst aber sollen die Sinusantwort (6.75) eines linearen zeitinvarianten Systems<br />
mit gebrochen rationaler <strong>Übertragungsfunktion</strong> G(s) und die Zusammenhänge (6.76),<br />
(6.77), (6.78) mit dem <strong>Frequenzgang</strong> auf rechnerischem Weg ermittelt werden. (Man<br />
vergleiche hierzu auch die in 6.2 im Unterpunkt 3) durchgeführten Berechnungen <strong>der</strong><br />
Sinusantwort für ein Beispielsystem 2. Ordnung mit Hilfe <strong>der</strong> <strong>Übertragungsfunktion</strong>.)<br />
Ein lineares zeitinvariantes Übertragungsglied habe die gebrochen rationale<br />
<strong>Übertragungsfunktion</strong> G(s). Dann gilt für beliebige korrespondierende Ein- und<br />
Ausgangssignale die Gleichung (6.11):<br />
Y ( s)<br />
= G(<br />
s)<br />
* U(<br />
s)<br />
.<br />
Als Eingangssignal wird eine Sinusschwingung aufgeschaltet ( U ˆ U = konst.<br />
= 0 )<br />
ˆ<br />
U 0ω<br />
u(<br />
t)<br />
= U sinωt<br />
o − •U<br />
( s)<br />
= ,<br />
(6.79)<br />
s²<br />
+ ω ²<br />
so dass im Bildbereich für das herauskommende Ausgangssignal gilt<br />
U ω<br />
( s)<br />
= G(<br />
s)<br />
* .<br />
s²<br />
+ ω ²<br />
Y 0 (6.80)<br />
Die Rücktransformation in den Zeitbereich nehmen wir über die<br />
Partialbruchentwicklung von Y(s) vor. Nehmen wir dazu o. E. d. A. an, dass G(s)<br />
sämtlich verschiedene reelle Pole besitzt, so lautet <strong>der</strong> Ansatz dafür:<br />
206
2<br />
rn<br />
r r<br />
Y ( s)<br />
= + + ... + + +<br />
s − α1 s − α2<br />
s −αω<br />
1444<br />
44 2444443<br />
1<br />
s −<br />
4<br />
jω<br />
424<br />
s +<br />
4<br />
j<br />
3<br />
ω<br />
1 (6.81)<br />
n Pole αi von G(s), k.k.P.P. ± jω von U(s),<br />
korrespondiert mit yu& & (t ) . Korrespondiert mit y∞ (t)<br />
.<br />
α 1t<br />
α 2t<br />
α n t<br />
y(<br />
t)<br />
= re<br />
+ r e + ... + r e + " Schwingung"<br />
1<br />
2<br />
n<br />
Wenn alle Pole αi von G(s) in <strong>der</strong> linken Hälfte <strong>der</strong> komplexen s – Ebene liegen, wie<br />
das für sog. stabile Übertragungsglie<strong>der</strong> <strong>der</strong> Fall ist, so verschwinden für große<br />
Zeiten (t ∞) die ersten n Teilvorgänge<br />
α it<br />
lin re<br />
− > 0,<br />
Re{ α } < 0,<br />
t−<br />
> ∞<br />
i<br />
so dass als stationäre Antwort nur die Schwingung<br />
y∞ (t)<br />
= £ -1⎧<br />
r r ⎫<br />
⎨ + ⎬<br />
⎩ s − jω<br />
s + jω<br />
⎭<br />
i<br />
(6.82)<br />
auftritt. Die beiden Partialbruchkoeffizienten r, r sind wie die Pole jω , − jω<br />
konjugiert<br />
komplex zueinan<strong>der</strong> und können nach 5.3.2. wie folgt berechnet werden:<br />
⎡<br />
U0ω<br />
⎤<br />
r = ⎢(<br />
s − jω<br />
) * G(<br />
s)<br />
s²<br />
ω ² ⎥<br />
⎣<br />
+ ⎦<br />
⎡ U ω ⎤ 0<br />
r = ⎢G(<br />
s)<br />
⎥<br />
⎣ s + jω<br />
⎦<br />
U0<br />
r = G(<br />
jω<br />
) = −<br />
2 j<br />
⎡ U ω ⎤ 0<br />
r = ⎢G(<br />
s)<br />
⎥<br />
⎣ s − jω<br />
⎦<br />
s=<br />
jω<br />
s=<br />
jω<br />
U0<br />
j G(<br />
jω<br />
) ,<br />
2<br />
⎡<br />
U0ω<br />
⎤<br />
r = ⎢(<br />
s + jω<br />
) * G(<br />
s)<br />
s²<br />
ω ² ⎥<br />
⎣<br />
+ ⎦<br />
s=<br />
− jω<br />
s=<br />
− jω<br />
U0<br />
U0<br />
r = − G(<br />
− jω<br />
) = j G(<br />
− jω<br />
) .<br />
2 j<br />
2<br />
~> Darstellung durch Betrag und Argument:<br />
U0<br />
r = * G(<br />
jω)<br />
2<br />
arg r = −90<br />
° + arg G(<br />
jω<br />
) = −90°<br />
+ ϕ<br />
U0<br />
U0<br />
r = * G(<br />
− jω)<br />
= * G(<br />
jω)<br />
= r<br />
2<br />
2<br />
arg r = 90 ° + arg G(<br />
− jω<br />
) = 90°<br />
− ϕ = −arg<br />
r.<br />
Damit folgt aus (6.82)<br />
207
y∞ (t)<br />
= £ -1<br />
⎧U0<br />
j ( ϕ −90)<br />
U0<br />
− j(<br />
ϕ−<br />
90)<br />
⎫<br />
⎪<br />
Ge<br />
G e<br />
⎪<br />
⎨<br />
2 + 2<br />
⎬<br />
⎪ s − jω<br />
s + jω<br />
⎪<br />
⎩<br />
⎭<br />
U 0<br />
j(<br />
ϕ−<br />
90)<br />
jωt<br />
− j(<br />
ϕ −90)<br />
− jωt<br />
= G(<br />
jω)<br />
( e e + e e ).<br />
2<br />
Mit <strong>der</strong> Euler – Beziehung ist das eine Cos – Schwingung<br />
bzw.<br />
y ( t)<br />
= U * G(<br />
jω)<br />
cos( ωt<br />
+ ϕ − 90)<br />
∞<br />
0<br />
y ( t)<br />
= U0<br />
* G(<br />
jω<br />
) sin( ωt<br />
+ ϕ).<br />
(6.83)<br />
∞<br />
arg G(jω)<br />
Die stationäre Antwort (6.83) auf die Erregung mit<br />
u t)<br />
= U sinωt<br />
( 0<br />
ist wie<strong>der</strong> eine Sinusschwingung mit <strong>der</strong> gleichen Frequenz ω, <strong>der</strong> Amplitude<br />
ˆ = U * G(<br />
jω<br />
)<br />
Y 0<br />
und <strong>der</strong> Phasenverschiebung<br />
ϕ = arg G(<br />
jω).<br />
Damit sind (6.76) und (6.77) rechnerisch bestätigt.<br />
208