

Antriebssystem für höchste Geschwindigkeiten - Bergische ...
Antriebssystem für höchste Geschwindigkeiten - Bergische ...
Antriebssystem für höchste Geschwindigkeiten - Bergische ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
5. Realisierung der drehgeberlosen Feldorientierung 76<br />
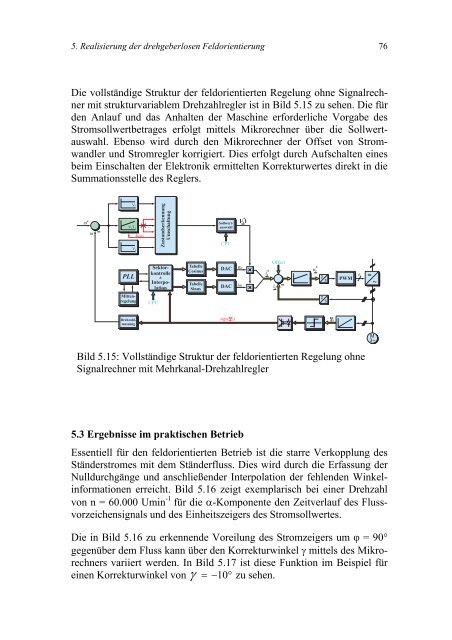
Die vollständige Struktur der feldorientierten Regelung ohne Signalrechner<br />
mit strukturvariablem Drehzahlregler ist in Bild 5.15 zu sehen. Die <strong>für</strong><br />
den Anlauf und das Anhalten der Maschine erforderliche Vorgabe des<br />
Stromsollwertbetrages erfolgt mittels Mikrorechner über die Sollwertauswahl.<br />
Ebenso wird durch den Mikrorechner der Offset von Stromwandler<br />
und Stromregler korrigiert. Dies erfolgt durch Aufschalten eines<br />
beim Einschalten der Elektronik ermittelten Korrekturwertes direkt in die<br />
Summationsstelle des Reglers.<br />
�*<br />
�<br />
V 2<br />
T 1<br />
V 1<br />
V 1<br />
PLL<br />
Mittenregelung<br />
Drehzahlmessung<br />
Reset<br />
Sektorkontrolle<br />
Interpolation<br />
CPU<br />
Zustandserkennung<br />
Umschaltung<br />
&<br />
Tabelle<br />
Cosinus<br />
Tabelle<br />
Sinus<br />
Sollwertauswahl<br />
CPU<br />
DAC<br />
Re<br />
DAC Im<br />
i s *<br />
i s *<br />
Offset<br />
i s<br />
u s *<br />
2<br />
3<br />
2<br />
3<br />
sign( ψs) s ψ<br />
PWM 6<br />
Bild 5.15: Vollständige Struktur der feldorientierten Regelung ohne<br />
Signalrechner mit Mehrkanal-Drehzahlregler<br />
5.3 Ergebnisse im praktischen Betrieb<br />
Essentiell <strong>für</strong> den feldorientierten Betrieb ist die starre Verkopplung des<br />
Ständerstromes mit dem Ständerfluss. Dies wird durch die Erfassung der<br />
Nulldurchgänge und anschließender Interpolation der fehlenden Winkelinformationen<br />
erreicht. Bild 5.16 zeigt exemplarisch bei einer Drehzahl<br />
von n = 60.000 Umin -1 <strong>für</strong> die α-Komponente den Zeitverlauf des Flussvorzeichensignals<br />
und des Einheitszeigers des Stromsollwertes.<br />
Die in Bild 5.16 zu erkennende Voreilung des Stromzeigers um φ = 90°<br />
gegenüber dem Fluss kann über den Korrekturwinkel γ mittels des Mikrorechners<br />
variiert werden. In Bild 5.17 ist diese Funktion im Beispiel <strong>für</strong><br />
einen Korrekturwinkel von γ = −10°<br />
zu sehen.<br />
=<br />
~<br />
M<br />
3~














