

Antriebssystem für höchste Geschwindigkeiten - Bergische ...
Antriebssystem für höchste Geschwindigkeiten - Bergische ...
Antriebssystem für höchste Geschwindigkeiten - Bergische ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
4. Signalgewinnung und Signalaufbereitung 50<br />
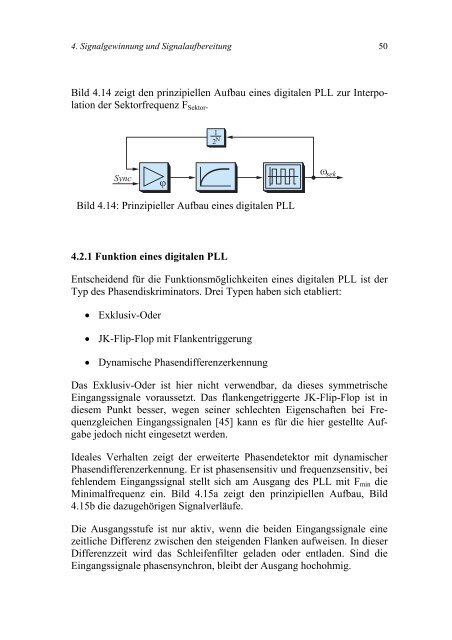
Bild 4.14 zeigt den prinzipiellen Aufbau eines digitalen PLL zur Interpolation<br />
der Sektorfrequenz FSektor.<br />
Sync<br />
�<br />
Bild 4.14: Prinzipieller Aufbau eines digitalen PLL<br />
1<br />
2 N<br />
4.2.1 Funktion eines digitalen PLL<br />
� sek<br />
Entscheidend <strong>für</strong> die Funktionsmöglichkeiten eines digitalen PLL ist der<br />
Typ des Phasendiskriminators. Drei Typen haben sich etabliert:<br />
• Exklusiv-Oder<br />
• JK-Flip-Flop mit Flankentriggerung<br />
• Dynamische Phasendifferenzerkennung<br />
Das Exklusiv-Oder ist hier nicht verwendbar, da dieses symmetrische<br />
Eingangssignale voraussetzt. Das flankengetriggerte JK-Flip-Flop ist in<br />
diesem Punkt besser, wegen seiner schlechten Eigenschaften bei Frequenzgleichen<br />
Eingangssignalen [45] kann es <strong>für</strong> die hier gestellte Aufgabe<br />
jedoch nicht eingesetzt werden.<br />
Ideales Verhalten zeigt der erweiterte Phasendetektor mit dynamischer<br />
Phasendifferenzerkennung. Er ist phasensensitiv und frequenzsensitiv, bei<br />
fehlendem Eingangssignal stellt sich am Ausgang des PLL mit Fmin die<br />
Minimalfrequenz ein. Bild 4.15a zeigt den prinzipiellen Aufbau, Bild<br />
4.15b die dazugehörigen Signalverläufe.<br />
Die Ausgangsstufe ist nur aktiv, wenn die beiden Eingangssignale eine<br />
zeitliche Differenz zwischen den steigenden Flanken aufweisen. In dieser<br />
Differenzzeit wird das Schleifenfilter geladen oder entladen. Sind die<br />
Eingangssignale phasensynchron, bleibt der Ausgang hochohmig.














