Antriebssystem für höchste Geschwindigkeiten - Bergische ...
Antriebssystem für höchste Geschwindigkeiten - Bergische ... Antriebssystem für höchste Geschwindigkeiten - Bergische ...
3. Feldorientierte Regelung der Synchronmaschine 31 den Betrieb der Maschine nicht optimal. Tabelle 3.1 fasst die Zuordnung der beschriebenen Signale zusammen. Flusszeiger Winkel ( ψs ) Winkel ( is* ) Adresse I II III IV V VI 330° 60° 30° 120° 90° 180° 150° 240° 210° 300° 270° 1 3 2 6 4 5 Tabelle 3.1: Winkel- und Adresszuordnung der Flusszeiger Mit der beschriebenen Abbildung der Nulldurchgänge im Flusssignal der einzelnen Phasen auf zeitdiskret gültige Sollstromzeiger kann bereits eine feldorientierte Regelung der Synchronmaschine erfolgen. Sollen jedoch sinusförmige Ströme in die Maschine eingeprägt werden ist eine zeitliche Interpolation der fehlenden Winkel innerhalb der 60° Sektoren erforderlich. Die zeitliche Interpolation der fehlenden Winkel kann mittels eines PLL (Phase-Locked Loop, Phasenregelkreis) erfolgen. Die Vorzeichensignale des Ständerflusses bilden dabei die Grundlage für die absolute Winkellage zu diskreten Zeitpunkten und gleichzeitig die Synchronisationssignale für die zu generierende Relativbewegung innerhalb eines Sektors. Dies ist möglich, weil sich die Drehzahl der Maschine aufgrund der geringen Dynamik des Antriebes nur langsam ändern kann. Die Relativgeschwindigkeit des Flussraumzeigers innerhalb eines Sektors wird daher als konstant angenommen. Beim Beschleunigen oder Abbremsen der Maschine entsteht somit durch die Geschwindigkeitsänderung innerhalb eines Sektors prinzipiell eine Fehlorientierung. Der Winkelfehler kann aufgrund des kleinen Betrages vernachlässigt werden kann. Bild 3.8 zeigt den Signalflussplan für die zeitliche Winkelinterpolation der Flusswinkel innerhalb eines Sektors. 0°
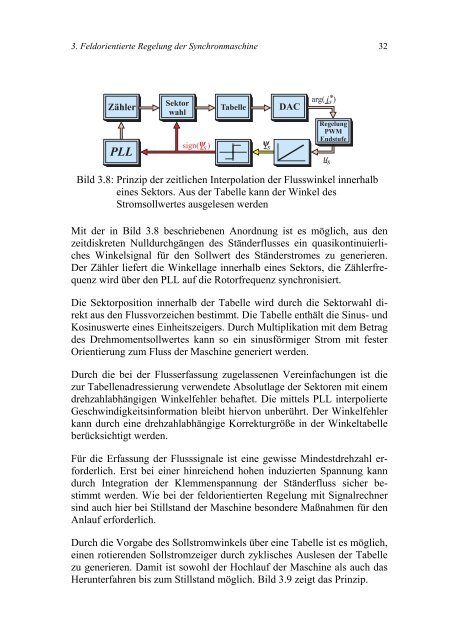
3. Feldorientierte Regelung der Synchronmaschine 32 Zähler PLL Sektor wahl Tabelle DAC sign( ψ s) s ψ arg( is ) * Regelung PWM Endstufe Bild 3.8: Prinzip der zeitlichen Interpolation der Flusswinkel innerhalb eines Sektors. Aus der Tabelle kann der Winkel des Stromsollwertes ausgelesen werden Mit der in Bild 3.8 beschriebenen Anordnung ist es möglich, aus den zeitdiskreten Nulldurchgängen des Ständerflusses ein quasikontinuierliches Winkelsignal für den Sollwert des Ständerstromes zu generieren. Der Zähler liefert die Winkellage innerhalb eines Sektors, die Zählerfrequenz wird über den PLL auf die Rotorfrequenz synchronisiert. Die Sektorposition innerhalb der Tabelle wird durch die Sektorwahl direkt aus den Flussvorzeichen bestimmt. Die Tabelle enthält die Sinus- und Kosinuswerte eines Einheitszeigers. Durch Multiplikation mit dem Betrag des Drehmomentsollwertes kann so ein sinusförmiger Strom mit fester Orientierung zum Fluss der Maschine generiert werden. Durch die bei der Flusserfassung zugelassenen Vereinfachungen ist die zur Tabellenadressierung verwendete Absolutlage der Sektoren mit einem drehzahlabhängigen Winkelfehler behaftet. Die mittels PLL interpolierte Geschwindigkeitsinformation bleibt hiervon unberührt. Der Winkelfehler kann durch eine drehzahlabhängige Korrekturgröße in der Winkeltabelle berücksichtigt werden. Für die Erfassung der Flusssignale ist eine gewisse Mindestdrehzahl erforderlich. Erst bei einer hinreichend hohen induzierten Spannung kann durch Integration der Klemmenspannung der Ständerfluss sicher bestimmt werden. Wie bei der feldorientierten Regelung mit Signalrechner sind auch hier bei Stillstand der Maschine besondere Maßnahmen für den Anlauf erforderlich. Durch die Vorgabe des Sollstromwinkels über eine Tabelle ist es möglich, einen rotierenden Sollstromzeiger durch zyklisches Auslesen der Tabelle zu generieren. Damit ist sowohl der Hochlauf der Maschine als auch das Herunterfahren bis zum Stillstand möglich. Bild 3.9 zeigt das Prinzip. u s
- Seite 1 und 2: Antriebssystem für höchste Geschw
- Seite 3 und 4: Inhalt I Inhaltsverzeichnis 1. Einl
- Seite 5 und 6: Inhalt III 6.3 Vergleichende Betrac
- Seite 7 und 8: 1. Einleitung 2 kennen. Entscheiden
- Seite 9 und 10: 1. Einleitung 4 Synchronmaschine, R
- Seite 11 und 12: 2. Eigenschaften eines Hochgeschwin
- Seite 13 und 14: 2. Eigenschaften eines Hochgeschwin
- Seite 15 und 16: 2. Eigenschaften eines Hochgeschwin
- Seite 17 und 18: 2. Eigenschaften eines Hochgeschwin
- Seite 19 und 20: 2. Eigenschaften eines Hochgeschwin
- Seite 21 und 22: 2. Eigenschaften eines Hochgeschwin
- Seite 23 und 24: 2. Eigenschaften eines Hochgeschwin
- Seite 25 und 26: 2. Eigenschaften eines Hochgeschwin
- Seite 27 und 28: 3. Feldorientierte Regelung der Syn
- Seite 29 und 30: 3. Feldorientierte Regelung der Syn
- Seite 31 und 32: 3. Feldorientierte Regelung der Syn
- Seite 33 und 34: 3. Feldorientierte Regelung der Syn
- Seite 35: 3. Feldorientierte Regelung der Syn
- Seite 39 und 40: 3. Feldorientierte Regelung der Syn
- Seite 41 und 42: 4. Signalgewinnung und Signalaufber
- Seite 43 und 44: 4. Signalgewinnung und Signalaufber
- Seite 45 und 46: 4. Signalgewinnung und Signalaufber
- Seite 47 und 48: 4. Signalgewinnung und Signalaufber
- Seite 49 und 50: 4. Signalgewinnung und Signalaufber
- Seite 51 und 52: 4. Signalgewinnung und Signalaufber
- Seite 53 und 54: 4. Signalgewinnung und Signalaufber
- Seite 55 und 56: 4. Signalgewinnung und Signalaufber
- Seite 57 und 58: 4. Signalgewinnung und Signalaufber
- Seite 59 und 60: 4. Signalgewinnung und Signalaufber
- Seite 61 und 62: 4. Signalgewinnung und Signalaufber
- Seite 63 und 64: 4. Signalgewinnung und Signalaufber
- Seite 65 und 66: 5. Realisierung der drehgeberlosen
- Seite 67 und 68: 5. Realisierung der drehgeberlosen
- Seite 69 und 70: 5. Realisierung der drehgeberlosen
- Seite 71 und 72: 5. Realisierung der drehgeberlosen
- Seite 73 und 74: 5. Realisierung der drehgeberlosen
- Seite 75 und 76: 5. Realisierung der drehgeberlosen
- Seite 77 und 78: 5. Realisierung der drehgeberlosen
- Seite 79 und 80: 5. Realisierung der drehgeberlosen
- Seite 81 und 82: 5. Realisierung der drehgeberlosen
- Seite 83 und 84: 5. Realisierung der drehgeberlosen
- Seite 85 und 86: 5. Realisierung der drehgeberlosen
3. Feldorientierte Regelung der Synchronmaschine 32<br />
Zähler<br />
PLL<br />
Sektor<br />
wahl<br />
Tabelle DAC<br />
sign( ψ<br />
s)<br />
s<br />
ψ<br />
arg( is ) *<br />
Regelung<br />
PWM<br />
Endstufe<br />
Bild 3.8: Prinzip der zeitlichen Interpolation der Flusswinkel innerhalb<br />
eines Sektors. Aus der Tabelle kann der Winkel des<br />
Stromsollwertes ausgelesen werden<br />
Mit der in Bild 3.8 beschriebenen Anordnung ist es möglich, aus den<br />
zeitdiskreten Nulldurchgängen des Ständerflusses ein quasikontinuierliches<br />
Winkelsignal <strong>für</strong> den Sollwert des Ständerstromes zu generieren.<br />
Der Zähler liefert die Winkellage innerhalb eines Sektors, die Zählerfrequenz<br />
wird über den PLL auf die Rotorfrequenz synchronisiert.<br />
Die Sektorposition innerhalb der Tabelle wird durch die Sektorwahl direkt<br />
aus den Flussvorzeichen bestimmt. Die Tabelle enthält die Sinus- und<br />
Kosinuswerte eines Einheitszeigers. Durch Multiplikation mit dem Betrag<br />
des Drehmomentsollwertes kann so ein sinusförmiger Strom mit fester<br />
Orientierung zum Fluss der Maschine generiert werden.<br />
Durch die bei der Flusserfassung zugelassenen Vereinfachungen ist die<br />
zur Tabellenadressierung verwendete Absolutlage der Sektoren mit einem<br />
drehzahlabhängigen Winkelfehler behaftet. Die mittels PLL interpolierte<br />
Geschwindigkeitsinformation bleibt hiervon unberührt. Der Winkelfehler<br />
kann durch eine drehzahlabhängige Korrekturgröße in der Winkeltabelle<br />
berücksichtigt werden.<br />
Für die Erfassung der Flusssignale ist eine gewisse Mindestdrehzahl erforderlich.<br />
Erst bei einer hinreichend hohen induzierten Spannung kann<br />
durch Integration der Klemmenspannung der Ständerfluss sicher bestimmt<br />
werden. Wie bei der feldorientierten Regelung mit Signalrechner<br />
sind auch hier bei Stillstand der Maschine besondere Maßnahmen <strong>für</strong> den<br />
Anlauf erforderlich.<br />
Durch die Vorgabe des Sollstromwinkels über eine Tabelle ist es möglich,<br />
einen rotierenden Sollstromzeiger durch zyklisches Auslesen der Tabelle<br />
zu generieren. Damit ist sowohl der Hochlauf der Maschine als auch das<br />
Herunterfahren bis zum Stillstand möglich. Bild 3.9 zeigt das Prinzip.<br />
u s


