Aufgaben - ETH Zürich
Aufgaben - ETH Zürich
Aufgaben - ETH Zürich

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Übungsaufgaben zur Vorlesung Regelsysteme – Herbstsemester 2012<br />
Übung 7: Reglerentwurf im Frequenzbereich<br />
Prof. Dr. Manfred Morari<br />
Institut für Automatik, <strong>ETH</strong> <strong>Zürich</strong><br />
A 7.1: Lead- / Lag-Kompensatoren mit SISO-Tool [FrPE94, Aufg. 6.15, 6.17]<br />
In den allermeisten praktischen Fällen verlangt der Entwurf von Lead- und Lag-Kompensatoren<br />
eine iterative Prozedur, ausgehend von geschätzten Parametern, um eine zufriedenstellende<br />
Lösung zu erhalten. In dieser Übung soll diese iterative Prozedur mit Hilfe des bereits bekannten<br />
MATLAB-Werkzeugs sisotool nachvollzogen werden.<br />
Wir betrachten ein Temperaturreglersystem mit der Übertragungsfunktion<br />
G(s) =<br />
K<br />
(2s + 1)(s + 1)( 1 . (1)<br />
2s + 1)<br />
Ziel dieser Übung ist es, zwei verschiedene Kompensatoren für G(s) mit Hilfe des sisotool<br />
zu entwerfen. Dadurch sollen die Entwurfprozesse sowie die Unterschiede der Lead- und Lag-<br />
Kompensatoren erarbeitet werden.<br />
In beiden Fällen sollen die folgenden Spezifikationen erfüllt werden:<br />
i) Der bleibende Regelfehler auf eine Einheitstufe als Referenz-Input sei 0.1.<br />
ii) Die Phasenreserve (PR) vom kompensierten System betrage mindestens 40 ◦ .<br />
1. Lead-Kompensator<br />
a) Bestimmen Sie K gemäss der Spezifikation i) und geben Sie die entsprechende Übertragungsfunktion<br />
in den MATLAB-Workspace ein.<br />
Hinweis: Starten Sie die Entwurfsapplikation mit dem Befehl sisotool in MATLAB, und<br />
importieren Sie die Übertragungsfunktion mit (File - Import).<br />
Betrachten Sie die Sprungantwort für den geschlossenen unkompensierten Regelkreis<br />
über Analysis Plots - Step - Closed Loop r to y.<br />
b) Beginnen Sie die iterative Prozedur indem Sie die Werte für den Pol und die Nullstelle<br />
des Lead-Kompensators entsprechend der Spezifikationen schätzen, und fügen Sie diesen<br />
dem Kompensator im sisotool hinzu.<br />
Hinweis: Befehlsfolge Compensator Editor - (Right-Click) - Add Pole/Zero.<br />
Wie gross ist die Phasenreserve des Systems mit den geschätzten Werten? Wie sieht<br />
das Übergangsverhalten des System für eine Sprungantwort aus?
Übung 7: Reglerentwurf im Frequenzbereich HS 2012<br />
c) Durch das Verschieben der Pole und Nullstellen auf dem Bodediagramm können Sie<br />
die Effekte auf das Verhalten des Systems beobachten.<br />
Untersuchen Sie die Veränderung von PR und Durchtrittsfrequenz beim Verschieben<br />
der Nullstellen und Pole, sowie die Veränderung der Sprungantwort. Was passiert, wenn<br />
der Pol sehr weit nach links verschoben wird?<br />
d) Finden Sie einen Lead-Kompensator für G(s), der die Spezifikationen erfüllt. Wie lauten<br />
die Kompensatorparameter T und α?<br />
2. Lag Kompensator<br />
a) Benutzen Sie das sisotool um ein K so zu bestimmen, dass der offene (unkompensierte)<br />
Regelkreis eine PR von mindestens 50 ◦ hat (40 ◦ aus Spezifikation ii) + 10 ◦ Reserve für<br />
Lag Design).<br />
b) Bestimmen Sie den Wert von β so, dass die Spezifikation des bleibenden Regelfehlers<br />
erfüllt wird. Wie sollte die Nullstelle des Kompensators gewählt werden?<br />
c) Testen und verbessern Sie Ihren Entwurf mithilfe des sisotool. Wie lauten die Kompensatorparameter<br />
T und β?<br />
d) Vergleichen Sie die Sprungantworten der beiden Kompensatoren.<br />
A 7.2: Lag-Kompensator [FrPE94, Aufg. 6.47]<br />
Die Übertragungsfunktion einer offenen Strecke sei<br />
G(s) =<br />
K<br />
s(1 + s s<br />
5 )(1 + 60 ).<br />
Entwerfen Sie einen Lag-Kompensator D(s) für G(s), sodass der geschlossene Regelkreis die<br />
folgenden Spezifikationen erfüllt:<br />
• Der bleibende Regelfehler auf eine Einheitsrampe als Eingang beträgt nicht mehr als 0.01.<br />
• Die Phasenreserve beträgt 40 ◦ ± 3 ◦ .<br />
Verifizieren Sie anschliessend Ihren Entwurf mit MATLAB.<br />
A 7.3: Lead-Kompensator [FrPE94, Aufg. 6.48]<br />
Die Übertragungsfunktion einer offenen Strecke sei<br />
G(s) =<br />
K<br />
s(1 + s s<br />
5 )(1 + 250 )<br />
Entwerfen Sie einen Lead-Kompensator D(s) für G(s), sodass der geschlossene Regelkreis die<br />
folgenden Spezifikationen erfüllt:<br />
• Der bleibende Regelfehler auf eine Einheitsrampe als Eingang beträgt nicht mehr als 0.01.<br />
• Für die dominanten Pole des geschlossenen Kreises beträgt die Dämpfung ζ = 0.4.<br />
Verifizieren Sie anschliessend Ihren Entwurf mit MATLAB.<br />
Übungsaufgaben Regelsysteme 2 von 4<br />
(2)<br />
(3)
Übung 7: Reglerentwurf im Frequenzbereich HS 2012<br />
A 7.4: Lead-Lag-Kompensator Design [Prüfung Herbst 2010]<br />
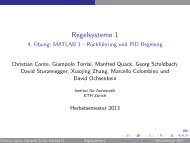
Der Standardregelkreis in Abbildung 1 besitze eine Regelstrecke mit Übertragungsfunktion<br />
G(s) =<br />
20<br />
. (4)<br />
(s + 1)(s + 2)(s + 5)<br />
Um das dynamische Verhalten zu verbessern soll in dieser Aufgabe ein Lead-Lag-Kompensator<br />
entworfen werden. Der schrittweise auszulegende Kompensator habe die allgemeine Form<br />
D(s) = K T1s + 1<br />
αT1s + 1<br />
<br />
=L1(s)<br />
β(T2s + 1)<br />
, (5)<br />
βT2s + 1<br />
<br />
=L2(s)<br />
wobei L1(s) das Lead-Element des Kompensators (mit den Parametern T1 > 0, α < 1) und<br />
L2(s) das Lag-Element des Kompensators (mit den Parametern T2 > 0, β > 1) darstellt.<br />
r(s)<br />
✲+ y(s)<br />
❡ ✲ D(s) ✲ G(s)<br />
✲<br />
✻–<br />
Abbildung 1 (zu A 7.4): Regelkreis<br />
a) Anhand des Bode-Diagramms von G(s) (Abb. 2):<br />
(i) Geben Sie die Amplitudenreserve AR, die Phasenreserve PR, sowie die Durchtrittsfrequenz<br />
ωc des Systems (4) an.<br />
(ii) Ermitteln Sie die proportionale Verstärkung K des Kompensators so, dass die Phasenreserve<br />
von KG(s) 25 ◦ beträgt. Geben Sie auch die neue Durchtrittsfrequenz an.<br />
Hinweis: Runden Sie K auf die nächste ganze Zahl.<br />
b) Als erstes soll die erste Iteration zum Entwurf des Lead-Kompensators L1(s) durchgeführt<br />
werden. Das Überschwingen des geschlossenen Kreises soll dadurch auf 25% reduziert werden.<br />
(i) Durch Anwendung des MATLAB-Befehls roots auf den Nenner der Übertragungsfunktion<br />
KG(s)/(1 + KG(s)), ermitteln Sie ob der geschlossene Kreis näherungsweise als<br />
ein System zweiter Ordnung betrachten lässt.<br />
(ii) Um welchen Betrag muss demnach die Phasenreserve angehoben werden, wenn Sie<br />
einen zusätzlichen Puffer von 10 ◦ einplanen?<br />
(iii) Bestimmen Sie die Parameter α und T1 so, dass die maximale Phasenanhebung 25 ◦<br />
beträgt und auf der Durchtrittsfrequenz der Strecke KG(s) liegt.<br />
c) Als zweites soll die erste Iteration zum Entwurf des Lag-Kompensators L2(s) durchgeführt<br />
werden.<br />
(i) Bestimmen Sie die Parameter β und T2 so, dass die bleibende Regelabweichung auf<br />
einen Schritteingang weniger als 5% beträgt und die Nullstelle des Kompensators eine<br />
Dekade unterhalb der Durchtrittsfrequenz der Strecke KG(s) liegt.<br />
(ii) Simulieren Sie die Einheitsschrittantwort des geschlossenen Kreises (mit dem Kompensator<br />
D(s)) mit MATLAB. Wie gross ist das Überschwingen? Welche der folgenden sind<br />
mögliche Erklärungen für die Abweichung der erwarteten 25%?<br />
Übungsaufgaben Regelsysteme 3 von 4
Übung 7: Reglerentwurf im Frequenzbereich HS 2012<br />
10<br />
5<br />
– Der Lag-Kompensator bewirkt eine geringe Absenkung der Phasenreserve P R, die hier<br />
vernachlässigt wurde aber eine Erhöhung des Überschwingens zur Folge haben kann.<br />
– Die Verschiebung der Durchtrittsfrequenz durch den Lead-Kompensator führt zu einer<br />
geringeren als der geplanten Phasenreserve und damit zu stärkerem Überschwingen.<br />
– Die angenommene Beziehung zwischen der Phasenreserve von D(s)G(s) und dem Überschwingen<br />
des geschlossenen Kreises gilt in exakter Form nur für Systeme 2. Ordnung.<br />
0<br />
−5<br />
−10<br />
−15<br />
Magnitude (dB)<br />
−20<br />
−25<br />
−30<br />
10 1<br />
10 0<br />
10 −1<br />
10 −2<br />
0<br />
−20<br />
−40<br />
−60<br />
−80<br />
−100<br />
−120<br />
−140<br />
Phase (deg)<br />
−160<br />
−180<br />
Abbildung 2 (zu A 7.4): Bode-Diagramm von G(s)<br />
Übungsaufgaben Regelsysteme 4 von 4<br />
−200<br />
−220<br />
10 1<br />
10 0<br />
10 −1<br />
10 −2<br />
Frequency (rad/sec)







![Convex Optimization: [0.5ex] from Real-Time ... - ETH Zürich](https://img.yumpu.com/18678007/1/190x143/convex-optimization-05ex-from-real-time-eth-zurich.jpg?quality=85)