REGELSYSTEME - ETH Zürich
REGELSYSTEME - ETH Zürich
REGELSYSTEME - ETH Zürich

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Institut für Automatik D-ITET<br />
<strong>ETH</strong> <strong>Zürich</strong> HS 08<br />
Prof. Dr. M. Morari 11.11.2008<br />
Name :<br />
Stud.-Nr. :<br />
<strong>REGELSYSTEME</strong><br />
Musterlösung Kurztest 2<br />
Achtung: Begründen Sie Ihre Antworten!<br />
Benutzen Sie keine Bleistifte und keine rote<br />
Farbe!<br />
Bitte schreiben Sie auf jede von Ihnen verwendete<br />
Seite Ihren Namen und Ihre Stud.-Nr.!<br />
Aufgabe Punkte max.<br />
1 8<br />
2 8<br />
3 11<br />
<br />
27
Regelsysteme Musterlösung HS 08<br />
1. Aufgabe<br />
System 2. Ordnung<br />
-<br />
2 2 4 8 Punkte<br />
R +<br />
+<br />
1<br />
1 Y<br />
K s+3 + s<br />
W<br />
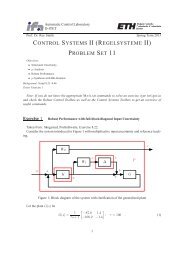
Abbildung 1: Regelkreis.<br />
Gegeben sei der in Abb. 1 dargestellte Regelkreis.<br />
a) Berechnen Sie die Übertragungsfunktionen Gr(s) und Gw(s) für die Gleichung<br />
Y (s) = Gr(s)R(s) + Gw(s)W(s).<br />
b) Berechnen Sie den statischen Regelfehler, wenn gleichzeitig eine Einheitsrampenfunktion<br />
als Referenzgrösse r(t) und eine Einheitssprungfunktion<br />
als Störung w(t) an dem Regelkreis anliegen.<br />
c) Nehmen Sie an, dass r(t) = 0 und als Störung w(t) eine Einheitssprungfunktion<br />
an dem Regelkreis anliegen. Berechnen Sie eine obere Schranke<br />
für die Verstärkung K, so dass die Überschwingweite des Ausgangssignals<br />
nicht mehr als Mp = 0.35 beträgt.<br />
Hinweis: Systeme 2. Ordnung mit zusätzlicher Nullstelle besitzen die Standardform<br />
<br />
s k + 1 αζωn<br />
H(s) = 2 s + 2ζ ωn<br />
s<br />
.<br />
+ 1 ωn<br />
Berücksichtigen Sie bei Ihren Berechnungen Abb. 2, in der die Überschwingweite<br />
Mp als Funktion der Dämpfung ζ und der relativen Lage<br />
α der Nullstelle dargestellt ist.<br />
2
Regelsysteme Musterlösung HS 08<br />
Abbildung 2: Verlauf der Überschwingweite Mp als eine Funktion der Dämpfung ζ<br />
und der relativen Lage α der Nullstelle bzgl. der Pole. Für α = 1 haben Nullstelle<br />
und Pole den gleichen Realteil.<br />
3
Regelsysteme Musterlösung HS 08<br />
Lösung für Aufgabe 1<br />
a)<br />
b)<br />
Gr(s) =<br />
K<br />
s 2 + 3s + K , Gw(s) =<br />
s + 3<br />
s 2 + 3s + K .<br />
E(s) = R(s) − Y (s) = s2 + 3s<br />
s2 s + 3<br />
R(s) −<br />
+ 3s + K s2 + 3s + K W(s).<br />
Der Endwertsatz ergibt<br />
lim e(t) = lim<br />
t→∞ s→0 sE(s)<br />
s<br />
= lim<br />
2 + 3s<br />
s→0 s<br />
s 2 + 3s + K<br />
1 s + 3<br />
− s<br />
s2 s2 1<br />
+ 3s + K s<br />
c) Die Übertragungsfunktion Gw(s) kann dargestellt werden als<br />
Gw(s) = 3<br />
K<br />
s<br />
√K<br />
s<br />
3<br />
+ 1<br />
2 + 3<br />
.<br />
s + 1 K<br />
= 0.<br />
Ein Vergleich mit der Standardform für Systeme 2. Ordnung mit Nullstelle<br />
ergibt:<br />
ωn = √ K, ζ = 3<br />
2 √ K .<br />
Dem Zähler von Gw(s) entnehmen wir<br />
αζωn = 3 .<br />
Also ist α = 2. Aus dem in Abb. 2 dargestellten Diagramm lässt sich<br />
ablesen, dass für eine Überschwungweite von Mp = 0.35 die Dämpfung<br />
ζ = 0.5 betragen muss. Dies bedeutet<br />
K ≤<br />
4<br />
2 3<br />
= 9.<br />
2 0.5
Regelsysteme Musterlösung HS 08<br />
2. Aufgabe<br />
Bode-Diagramm, Impuls- und Schritt-Antworten<br />
8 8 Punkte<br />
a) Assoziieren Sie die Bode-Diagramme und Impulsantworten von vier offenen<br />
Kreisen sowie die Schrittantworten der jeweiligen geschlossenen Kreise<br />
(mit Einheitsrückführung, siehe Abbildung 2) miteinander. Alle Graphen<br />
können zugeordnet werden.<br />
r<br />
−<br />
G(s)<br />
Abbildung 3: Geschlossener Kreis mit Einheitsrückführung.<br />
Bodediagramm Impulsantwort Schrittantwort (geschl. Sys.)<br />
A<br />
B<br />
C<br />
D<br />
5<br />
y
Regelsysteme Musterlösung HS 08<br />
Magnitude (dB)<br />
Phase (deg)<br />
Magnitude (dB)<br />
Phase (deg)<br />
Magnitude (dB)<br />
Phase (deg)<br />
Magnitude (dB)<br />
Phase (deg)<br />
20<br />
0<br />
-20<br />
360<br />
180<br />
0<br />
-40<br />
10 -2<br />
40<br />
0<br />
90<br />
0<br />
-90<br />
10 -1<br />
0<br />
-100<br />
-200<br />
0<br />
-180<br />
-360<br />
10 -1<br />
0<br />
-50<br />
-100<br />
180<br />
90<br />
0<br />
10 -1<br />
10 -1<br />
Bode-Diagramme (offener Kreis)<br />
10 0<br />
10 0<br />
10 0<br />
10 0<br />
10 1<br />
Frequency (rad/sec)<br />
Frequency (rad/sec)<br />
Frequency (rad/sec)<br />
Frequency (rad/sec)<br />
6<br />
10 1<br />
10 1<br />
10 1<br />
10 2<br />
10 3<br />
10 2<br />
10 2<br />
10 2<br />
A<br />
B<br />
C<br />
D
Regelsysteme Musterlösung HS 08<br />
Amplitude<br />
Amplitude<br />
Amplitude<br />
1<br />
0.5<br />
Impulsantworten (offener Kreis)<br />
0<br />
0 0.2 0.4 0.6 0.8 1<br />
Time (sec)<br />
20<br />
0<br />
-20<br />
0 5 10 15<br />
Time (sec)<br />
0.5<br />
0<br />
-0.5<br />
0 10 20 30 40 50<br />
Amplitude<br />
x 107<br />
3<br />
2<br />
1<br />
Time (sec)<br />
0<br />
0 0.2 0.4 0.6 0.8 1<br />
Time (sec)<br />
7<br />
I<br />
II<br />
III<br />
IV
Regelsysteme Musterlösung HS 08<br />
Amplitude<br />
Amplitude<br />
Amplitude<br />
Amplitude<br />
1<br />
0.5<br />
-0.1<br />
Sprungantworten (geschl. Kreis mit Einheitsrückführung)<br />
0<br />
0 2 4<br />
Time (sec)<br />
6 8 10<br />
0.1<br />
0<br />
-0.2<br />
0 20 40 60 80 100<br />
Time (sec)<br />
1.5<br />
1<br />
0.5<br />
0<br />
0 0.2 0.4 0.6 0.8 1<br />
Time (sec)<br />
1<br />
0.5<br />
0<br />
0 2 4<br />
Time (sec)<br />
6 8 10<br />
8<br />
1<br />
2<br />
3<br />
4
Regelsysteme Musterlösung HS 08<br />
Lösung für Aufgabe 2<br />
a)<br />
Bodediagramm Impulsantwort Schrittantwort (geschl. Sys.)<br />
A IV 3<br />
B II 1<br />
C I 4<br />
D III 2<br />
9
Regelsysteme Musterlösung HS 08<br />
3. Aufgabe<br />
Stabilitätskriterium von Routh<br />
Gegeben sei der in Abb. 4 dargestellte Regelkreis für die Strecke<br />
G(s) =<br />
(s + 1)(s + 3)<br />
s(s − 1)(s + 2) .<br />
9 2 11 Punkte<br />
Der Regelkreis enthält eine Einheitsrückführung; durch einen Schalter s1 lässt<br />
sich der P-Regler K hinzuschalten.<br />
.<br />
r<br />
+<br />
-<br />
s 1<br />
K<br />
+<br />
+<br />
G(s)<br />
Abbildung 4: Regelkreis mit Einheitsrückführung und P-Regler.<br />
a) Nehmen Sie an, dass der Schalter s1 geschlossen ist. Benutzen Sie das<br />
Stabilitätskriterium von Routh, um die Werte von K zu bestimmen, für<br />
die der Regelkreis stabil ist.<br />
b) Ist das geregelte System stabil, wenn der Schalter s1 geöffnet ist? Begründen<br />
Sie Ihre Antwort.<br />
10<br />
y
Regelsysteme Musterlösung HS 08<br />
Lösung für Aufgabe 3<br />
a) Die Übertragungsfunktion des geschlossenen Kreises ist<br />
T(s) =<br />
=<br />
=<br />
=<br />
=<br />
G(s)(1 + K)<br />
1 + G(s)(1 + K)<br />
(K+1)(s2 +4s+3)<br />
s3 +s2−2s 1 + (K+1)(s2 +4s+3)<br />
s3 +s2−2s (K+1)(s2 +4s+3)<br />
s3 +s2−2s s3 +s2−2s+(K+1)(s2 +4s+3)<br />
s3 +s2−2s (K + 1)(s2 + 4s + 3)<br />
s3 + s2 − 2s + (K + 1)(s2 + 4s + 3)<br />
(K + 1)(s2 + 4s + 3)<br />
s3 + (K + 2)s2 + (4K + 2)s + 3(K + 1) .<br />
Für das charakteristische Polynom s 3 + (K + 2)s 3 + (4K + 2)s 2 + 3K + 3<br />
ergibt sich das folgende Routh Tableau:<br />
mit<br />
s 3 1 4K + 2 0<br />
s 2 K + 2 3K + 3 0<br />
s 1 b1 b2<br />
s 0 c1<br />
b1<br />
(K + 2)(4K + 2) − 3K − 3<br />
=<br />
K + 2<br />
b2 = 0<br />
c1 = 3K + 3<br />
= 4K2 + 7k + 1<br />
K + 2<br />
Das System ist genau dann stabil, wenn die Koeffizienten des charakteristischen<br />
Polynoms positiv sind,<br />
1 > 0 (1)<br />
4K + 2 > 0 ⇒ K > − 1<br />
2<br />
(2)<br />
K + 2 > 0 ⇒ K > −2 (3)<br />
3K + 3 > 0 ⇒ K > −1 (4)<br />
11
Regelsysteme Musterlösung HS 08<br />
und es keine Vorzeichenwechsel in der ersten Spalte des Routh Tableaus<br />
gibt (also alle Elemente der ersten Spalte positiv sind).<br />
K + 2 > 0 ⇒ K > −2 (5)<br />
c1 > 0 ⇒ K > −1 (6)<br />
b1 > 0 ⇒ (K+2>0) 4K 2 + 7K + 1 > 0 (7)<br />
⇒ K > −0.1575 or K < −1.5925<br />
Eine Kombination der Bedingungen ergibt Stabilität für K > −0.1575.<br />
b) Das System ist auch für offenen Schalter s1 stabil. Der geöffnete Schalter<br />
ist gleichbedeutend mit K = 0, und aus dem Ergebnis von Aufgabenteil<br />
wissen wir, dass das geschlossene System für K = 0 stabil ist.<br />
12







![Convex Optimization: [0.5ex] from Real-Time ... - ETH Zürich](https://img.yumpu.com/18678007/1/190x143/convex-optimization-05ex-from-real-time-eth-zurich.jpg?quality=85)