Handbuch SeBCON-µC Für Volvo-Motoren B 230 FT/FK/GK
Handbuch SeBCON-µC Für Volvo-Motoren B 230 FT/FK/GK
Handbuch SeBCON-µC Für Volvo-Motoren B 230 FT/FK/GK

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>Handbuch</strong><br />
<strong>SeBCON</strong>-<strong>µC</strong><br />
<strong>Für</strong> <strong>Volvo</strong>-<strong>Motoren</strong><br />
B <strong>230</strong> <strong>FT</strong>/<strong>FK</strong>/<strong>GK</strong><br />
Verfasser: aimypost & stoni<br />
Version: 1.2<br />
Stand: 10.01.2010
Inhaltsverzeichnis<br />
1 Einleitung ....................................................................................3<br />
2 Produktmerkmale..........................................................................3<br />
2.1 Funktionsweise ................................................................................ 3<br />
2.1.1 Einspritzsignal und Luftmassenmesser........................................................... 3<br />
2.1.2 Klopfkontrolle ....................................................................................... 4<br />
2.1.3 Kontrolle der Motortemperatur................................................................... 4<br />
2.1.4 Ladedruck ............................................................................................ 4<br />
2.2 KFZ-Voraussetzungen ........................................................................ 4<br />
2.2.1 Solenoid .............................................................................................. 4<br />
2.2.2 Turbolader ........................................................................................... 5<br />
3 Einbau ........................................................................................5<br />
3.1 Anschlüsse ...................................................................................... 6<br />
3.1.1 Anschlüsse <strong>SeBCON</strong>-<strong>µC</strong> ............................................................................. 6<br />
3.1.2 Anschlüsse LH 2.4/EZK-116........................................................................ 6<br />
4 Eigene Anpassungen der <strong>SeBCON</strong>-<strong>µC</strong>...................................................9<br />
4.1 Voraussetzungen .............................................................................. 9<br />
4.1.1 Datenübertragung................................................................................... 9<br />
4.1.2 Einstellungen zur Programmiersoftware .......................................................10<br />
4.1.3 Anschlussbedingungen für die zwei freien Kabel .............................................12<br />
4.2 Nachrüstung: Signallampe ..................................................................13<br />
4.2.1 Programmierung....................................................................................14<br />
4.3 Andere Solenoiden...........................................................................14<br />
4.3.1 Programmierung....................................................................................15<br />
5 Technische Daten ........................................................................ 16<br />
5.1 Platine ..........................................................................................16<br />
5.2 ATMEL AVRmicro ATtiny461 ..............................................................17<br />
5.3 Schaltplan LH Jetronic 2.4 .................................................................17<br />
6 Programmcode der Verkaufsversion ................................................. 19<br />
7 Fotodokumentationen .................................................................. 23<br />
8 Quellen..................................................................................... 25<br />
9 Abbildungsverzeichnis .................................................................. 26<br />
2
1 Einleitung<br />
<strong>SeBCON</strong>-<strong>µC</strong> 1 ist ein universeller programmierbarer Boost-Controller für Turbomotoren mit<br />
mechanischer Ladedruckregelung mit dem ein moderner pulsweiten-modulierter 2 Solenoid 3<br />
nachgerüstet werden kann und somit eine stufenlose Ladedruckregelung möglich ist.<br />
Dieses <strong>Handbuch</strong> ist speziell für die <strong>Volvo</strong>-Turbomotoren der 9er-Baureihe B<strong>230</strong> (LH Jetronic 2.4) 4<br />
geschrieben und bezieht sich auf die Version der <strong>SeBCON</strong>-<strong>µC</strong> so wie sie verkauft wird. Abweichungen<br />
hiervon werden extra benannt und hauptsächlich in Kapitel 0 behandelt.<br />
2 Produktmerkmale<br />
Mit der <strong>SeBCON</strong>-<strong>µC</strong> können bei 1 Bar Ladedruck mit einem Serienmotor ca. 190-200PS und 280-300<br />
Nm Drehmoment erreicht werden.<br />
Vorprogrammiert, Plug-n-Drive<br />
Programmierbarer PWM Boost Controller<br />
High-performance, Low-power AVR® ATtiny461 8-bit Microcontroller<br />
RS-232 Interface, freier Compiler und Programmer Software<br />
Programmiert in Basic, freier Source Code für Anpassungen bzw. eigene Erweiterungen<br />
Eingang für Einspritzdüsensignal (Last & Drehzahl)<br />
Eingang für zusätzliches Lastsignal z.B. Luftmassenmesser<br />
Eingang für Klopfsignal, verwendet das Klopfsignal der BOSCH EZ116K/EZ117K Zündeinheit<br />
Eingang für Vollast-/Drosselklappenschalter<br />
Eingang für Motortemperatursensor<br />
Zwei freie Input/Output Kanäle (ADC oder I/O)<br />
Auto Boost Funktion für sehr gutes Teillastverhalten<br />
Adaptive Klopfregelung, korrigiert den Ladedruck automatisch<br />
Overboost über die Software einstellbar, Standard ist +0.15 Bar über den Volllastkontakt<br />
Max-Load Funktion, <strong>SeBCON</strong>-<strong>µC</strong> hält eine eingestellte maximale Motorlast ein<br />
Kompakte Größe (50mm x 100mm)<br />
2.1 Funktionsweise<br />
2.1.1 Einspritzsignal und Luftmassenmesser<br />
<strong>SeBCON</strong>-<strong>µC</strong> analysiert die Puls/Pausenzeit des Einspritzdüsensignals um die Motorlast zu bestimmen.<br />
Die Auswertung des Einspritzdüsensignals ermöglicht eine sehr gute Anpassung des Ladedrucks und<br />
ergibt eine viel bessere Fahrbarkeit gegenüber konventionellen Systemen, welche immer versuchen<br />
den maximal möglichen Ladedruck zu generieren. Ebenso wird das Luftmassenmesser-Signal mit in<br />
die Berechnung der Motorlast integriert, dieser 'Mixed-Mode' ermöglicht eine sehr gute Reaktion auf<br />
eine Veränderung der Gaspedalstellung, da der LMM 5 als erster eine Veränderung in der<br />
Leistungsanforderung registriert. Somit kann der Ladedruck schon korrigiert werden bevor die<br />
Laständerung über das Einspritzdüsensignal erkannt wird.<br />
Vorzüge der Berechnung des Ladedrucks über die Einspritzdüsenzeit:<br />
bessere Kontrolle der Motorleistung über das Gaspedal<br />
Ladedruck proportional zur Gaspedalstellung<br />
Seriennaher Verbrauch im Teillastbereich<br />
Tempomat-Kompatibel<br />
1 Stoni's elektronischer Boost Controller<br />
2 PWM=Puls-Wide-Modulation (Taktung)<br />
3 Solenoid=Elektromagnetisches Ventil<br />
4 Letzte Version der Einspritzelektronik für den 9er<br />
5 LMM=Luftmassenmesser<br />
3
2.1.2 Klopfkontrolle<br />
Die Klopfkontrolle arbeitet adaptiv. Wenn während des Betriebes Klopfen auftritt, wird im<br />
entsprechenden Drehzahlbereich die Last-Map 6 korrigiert. Die adaptiven Werte werden nach<br />
Fahrtende wieder verworfen. Zur Klopfkontrolle wird ein externes Modul benötigt, wie z.B. die<br />
Bosch-EZK116 (Zünd-Steuergerät). <strong>SeBCON</strong>-<strong>µC</strong> hat keine eigene Elektronik für die Auswertung eines<br />
Klopfsensors, sondern nur einen Eingang welcher ein schon aufbereitetes Klopfsignal zur Auswertung<br />
entgegen nimmt.<br />
2.1.3 Kontrolle der Motortemperatur<br />
Aus Sicherheitsgründen arbeitet die <strong>SeBCON</strong>-<strong>µC</strong> erst ab einer Motortemperatur von ~87 Grad.<br />
Hiermit ist sichergestellt, dass der Motor nicht im kalten Zustand mit dem maximalen Ladedruck<br />
belastet wird.<br />
Hinweis: Die <strong>SeBCON</strong>-<strong>µC</strong> wird ab den 10.01.2010 standardmäßig mit dieser Funktion ausgeliefert<br />
(Programmversion 1.24a). Vorher ausgelieferte <strong>SeBCON</strong>-<strong>µC</strong> benötigen ein Update der Software.<br />
2.1.4 Ladedruck<br />
Normalerweise wird der Ladedruck über den Boost-Poti eingestellt was in der Regel ausreichend sein<br />
sollte. Wenn es in bestimmten Drehzahlbereichen Probleme mit dem Ladedruck gibt, dass der<br />
Ladedruck z.B. zu niedrig oder zu hoch ist, so kann dieses über die Software korrigiert werden. Dazu<br />
steht eine Map zur Verfügung, welche a' 100U/min die maximal mögliche Motorlast enthält. Dieser<br />
Wert kann nach oben bzw. unten korrigiert werden, um den Ladedruck im gewünschten Bereich zu<br />
korrigieren.<br />
2.2 KFZ-Voraussetzungen<br />
2.2.1 Solenoid<br />
Die Programmierung der <strong>SeBCON</strong>-<strong>µC</strong> ist mit 2 verschiedenen Solenoiden von <strong>Volvo</strong> getestet und<br />
programmiert worden. Das empfohlene Taktventil aus dem V70 erbringt die beste Leistung. Andere<br />
Taktventile, insbesondere sogenannte Bleeder-Valves 7 , passen unter Umständen nicht zur<br />
Programmierung und benötigen eine Anpassung der Software.<br />
3-Wege-Ventil<br />
Pierburg 7.22240.13.0 12V bzw.<br />
<strong>Volvo</strong> Teile Nr.: 30670448 (7.22240.11) - <strong>Volvo</strong> 850, S/C/V70, S60, S80 und XC90 Turbo Modelle<br />
Abbildung 1: Empfohlener Solenoid<br />
6 Definierter Last-Bereich der <strong>SeBCON</strong>-<strong>µC</strong> , siehe Dim Elmap(60) in Kapitel 6<br />
7 Das Ventil des originalen T+ Kit ist ein Bleeding-Valve; siehe Kapitel 4.3<br />
4
Die Anschlüsse des Ventils sind farblich markiert:<br />
Rot: Anschluss vom Verdichtergehäuse<br />
Gelb: Anschluss an das Wastegate (Steuerdruck für das Wastegate)<br />
Blau: In den Luftfilterkasten (drain)<br />
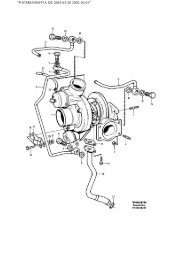
2.2.2 Turbolader<br />
Die <strong>SeBCON</strong>-<strong>µC</strong> funktioniert mindestens mit folgenden Turboladern:<br />
Garrett T2543<br />
Garret T3- 42/48AR<br />
MHI TD04H-13C-6<br />
MHI TD04HL-15G-7<br />
Es wird dringend empfohlen, die Druckdose auf einen Grundladedruck von 0,3 Bar einzustellen.<br />
Diese Maßnahme ist notwendig, da die <strong>SeBCON</strong>-<strong>µC</strong> für eine gute Regelung im Teillastbereich<br />
(Winter, Tempomat, Verbrauch) extra abgestimmt und programmiert ist. Wird diese Maßnahme<br />
nicht durchgeführt ist u. U. ein ausgewogenes Verhalten (Verlauf des Ladedrucks) im Teillastbereich<br />
nicht mehr gegeben.<br />
3 Einbau<br />
Auf Grund der thermischen Einflüsse im Motorraum wird empfohlen die <strong>SeBCON</strong>-<strong>µC</strong> im Fahrgastraum<br />
zu installieren. Als Einbauorte bieten sich z.B. an<br />
unter dem Handschuhfach (Fußraum)<br />
hinter dem Aschenbecher (Relaizentrale)<br />
im Handschuhfach (Lochbohrung erforderlich)<br />
In allen Fällen kann der Kabelbaum der <strong>SeBCON</strong>-<strong>µC</strong> durch die Spritzwand auf der rechten Seite<br />
durchgezogen werden.<br />
Abbildung 2: Größendarstellung der <strong>SeBCON</strong>-<strong>µC</strong><br />
5
3.1 Anschlüsse<br />
3.1.1 Anschlüsse <strong>SeBCON</strong>-<strong>µC</strong><br />
Kabelfarbe Funktion<br />
blau Luftmassenmessersignal<br />
grün +12V Zündungsplus<br />
grün / weiß Einspritzdüsen Signal/Drehzahlsignal<br />
braun / weiß Volllastsignal der Drosselklappe<br />
braun Klopfsignal<br />
blau / weiß Motor-Temperatursensor<br />
orange PB6 / ADC - nicht belegt<br />
orange / weiß PB5 / ADC - nicht belegt<br />
Solenoid: +12V mit Sicherung (5-10<br />
Amp.), Dauerplus oder Zündungsplus<br />
Dicke Kabel blau Solenoid: Masse<br />
Dicke Kabel rot Dauerplus Batterie<br />
Dicke Kabel schwarz Masse <strong>SeBCON</strong>-<strong>µC</strong><br />
3.1.2 Anschlüsse LH 2.4/EZK-116<br />
Dieses Kapitel zeigt die Anschlussmöglichkeiten für die <strong>SeBCON</strong>-<strong>µC</strong> auf. Es empfiehlt sich, möglichst<br />
viele Anschlüsse an die PINs der LH zu löten.<br />
Function -<br />
LH 2.4<br />
(4/23) 8<br />
EZK-116<br />
(4/10)<br />
Verbindung<br />
(C54/C55)<br />
rechter<br />
Federbeindom<br />
<strong>SeBCON</strong> III<br />
Signals PIN Cable PIN Cable POS Cable 8 dünne Kabel Beschreibung<br />
Klopfen (7/24) 28 GR-R 4 9 GR-R C54-1 R-GR braun Original T+ Kabel R/W (1)<br />
Drosselklappe<br />
(3/50) Vollgas<br />
LMM (7/17) 7 BL-R 4 GR-R blau oder PIN 3 am LMM<br />
C55-8 R-W braun / weiß Original T+ Kabel SB/W (7)<br />
Düsen (8/6-9) 18 GR grün / weiß<br />
Klemme 15 grün Kl. 15 Zündung<br />
Temperatursensor<br />
13 blau / weiß A7<br />
n/a orange PB6 - ADC for free use<br />
n/a orange / weiß PB5 - ADC for free use<br />
Masse schwarz<br />
3 dicke Kabel Beschreibung<br />
Power +12V rot Dauerplus (Batterie)<br />
Solenoid<br />
(Steuerung)<br />
blau<br />
Das zweite Kabel des<br />
Solenoiden an Dauerplus<br />
+12V (5-10 Amp. Sicherung)<br />
Abweichungen Modelljahre (Mj) bis -94 8 dünne Kabel Beschreibung<br />
Klopfen (7/24) 28 GR-R 4 GR-R C55-1 10 R-GR braun Original T+ Kabel R/W (1)<br />
Drosselklappe<br />
(3/50) Vollgas<br />
n/a n/a n/a n/a C54-7 R-W braun / weiß Original T+ Kabel SB/W (7)<br />
8<br />
Angaben in Klammern bezeichnen das jeweilige Bauteil nach originalem Schaltplan.<br />
9<br />
EZK-117 (LH 2.2) auf PIN 15<br />
10<br />
Im originalen Schaltplan aus SHB 003221/1 für Mj93 ist PIN 3 genannt; vermutlich ein Fehler.<br />
6
Abbildung 3: Stecker am rechten Federbeindom (ab Mj94-)<br />
Abbildung 4: Kabelbelegung der Stecker am rechten Federbeindom (ab Mj94-)<br />
7
Abbildung 5: Stecker am rechten Federbeindom (bis Mj93)<br />
8
4 Eigene Anpassungen der <strong>SeBCON</strong>-<strong>µC</strong><br />
Die nachfolgenden Kapitel sind für fortgeschrittene Nutzer bestimmt die ihre <strong>SeBCON</strong>-<strong>µC</strong> mit<br />
weiteren Funktionen/Sensoren ausbauen möchten oder einfach nur die vorhandene<br />
Serienprogrammierung verfeinern möchten.<br />
Der Quellcode ist öffentlich und unterliegt keinen lizenzrechtlichen Restriktionen, so dass es jedem<br />
möglich ist, den Code anzupassen.<br />
4.1 Voraussetzungen<br />
Notwendig ist ein Compiler und eine Flash-Software:<br />
Compiler “BASCOM-AVR”: http://www.mcselec.com<br />
Flash-Software “PonyProg2000”: http://www.lancos.com/prog.html<br />
Computer mit serieller Schnittstelle RS-232 und Adapterkabel 10-Pin auf DB9 11<br />
<strong>Für</strong> die genannte Software fallen keine Lizenzkosten an.<br />
4.1.1 Datenübertragung<br />
Wer die passenden Kabel besitzt, kann dieses Kapitel überspringen.<br />
Die benötigten Kabel können einzeln oder bei Bestellung der <strong>SeBCON</strong>-<strong>µC</strong> bei Stoni geordert werden.<br />
<strong>Für</strong> die Kommunikation über die PC-Schnittstelle RS-232 (COM) auf Pfostenstecker zur <strong>SeBCON</strong>-<strong>µC</strong><br />
können z.B. folgende Bauteile beim Elektronikanbieter Reichelt 12 bezogen werden:<br />
RS-232 ADAPTER 9-POLIG, Artikel-Nr.: AK 2310 13<br />
D-SUB Kabel, 1:1, 9-pol., BU/BU, Artikel-Nr.: AK 2310<br />
Abbildung 6: RS-232 Adapterkabel von Pfostenstecker auf COM<br />
Abbildung 7: D-Sub, serielles Datenkabel mit COM BU/BU<br />
11 Aufgrund des verringerten Datenvolumens wird auf ‚USB-to-Serial-Adapter’ verzichtet<br />
12 Alternativ bei Conrad: Artikel-Nr.: 976253 – 62, 971131 – 62 und 981281 – 62<br />
13 PIN 1 Kabelader ist i. d. R. farblich markiert<br />
9
Damit die Datenkommunikation funktioniert, muss das Bauteil „Abbildung 6: RS-232 Adapterkabel<br />
von Pfostenstecker auf COM“ angepaßt werden:<br />
1. Entfernung des Blechstreifens<br />
Abbildung 8: <strong>SeBCON</strong>-<strong>µC</strong>-Programmierkabel<br />
2. Umlöten der PINs am 9-poligen Stecker (COM) wie folgt:<br />
Abbildung 9: PIN-Belegung des <strong>SeBCON</strong>-<strong>µC</strong>-Programmierkabels<br />
4.1.2 Einstellungen zur Programmiersoftware<br />
4.1.2.1 BASCOM-AVR<br />
Bascom-AVR kann ohne Veränderungen nach der Installation benutzt werden, es sind keine weiteren<br />
Einstellungen notwendig. Nach einer Änderung im Quellcode muss dieser nur mit F7 neu kompiliert<br />
werden, anschließend findet sich im Quellcode-Ordner ein gleichnamiges File mit der Endung BIN.<br />
Diese BIN.Datei kann dann mit Hilfe des Programms PonyProg2000 in den Mikrocontroller der<br />
<strong>SeBCON</strong>-<strong>µC</strong> geschrieben werden.<br />
10
4.1.2.2 PonyProg2000<br />
Nach erfolgreicher Installation der Software müssen nachfolgende Arbeitsschritte ausgeführt<br />
werden:<br />
1. In der Menüleiste rechts oben muss der richtige Mikrocontroller eingestellt werden, damit<br />
die <strong>SeBCON</strong>-<strong>µC</strong> programmiert werden kann.<br />
Abbildung 10: Auswahl des Mikrocontroller<br />
Die nachfolgenden 2 Arbeitsschritte sind unter dem Menüpunkt Setup zu finden.<br />
2. Prüfen, ob der richtige COM-Port eingestellt ist.<br />
Abbildung 11: Einstellung des COM-Ports<br />
3. Abschließend muss eine einmalige Kalibrierung durchgeführt werden.<br />
Abbildung 12: Kalibrierung der Ports<br />
Nachdem die zuvor erzeugte bin.Datei geladen wurde, kann diese mit STRG-W (Menü Commandwrite<br />
all) in den Mikrocontroller geschrieben werden.<br />
11
4.1.3 Anschlussbedingungen für die zwei freien Kabel<br />
<strong>SeBCON</strong>-<strong>µC</strong> bietet 2 weitere freiprogrammierbare Ein/Ausgange/AD-Converter; dies ermöglicht den<br />
Anschluss und die Programmierung von eigenen Sensoren bzw. Funktionen.<br />
Um die freien Eingänge benutzen zu können, muss ein Eingangssignal im Bereich von 0 - 5,25 Volt<br />
geliefert werden:<br />
Wenn der Port als AD-Wandler fungieren soll:<br />
Signal 0 - 5,25 Volt entspricht DAC-Werten von 0-1023 (10Bit Auflösung)<br />
Wenn der Port als I/O-Eingangs-Port fungieren soll:<br />
Angelegte Spannung 0 – 1 Volt bedeutet logisch 0, 4 – 5 Volt bedeutet logisch 1,<br />
dazwischen ist ein undefinierter Bereich.<br />
Wenn der Port als I/O-Ausgangs-Port fungieren soll:<br />
Per Software auf 0 gesetzt liegt der Ausgang auf Masse<br />
Per Software auf 1 gesetzt liegt der Ausgang auf Betriebsspannung (Volt)<br />
Die maximale Spannung an den Ports darf 12 Volt nicht übersteigen. Die Ports sind mit<br />
Schutzwiderständen von 470 Ohm versehen um die Eingänge zu schützen.<br />
Anschlussmöglichkeit:<br />
<strong>SeBCON</strong> III<br />
dünne Kabel Beschreibung<br />
orange PB6 - ADC – nicht belegt<br />
orange / weiß PB5 - ADC – nicht belegt<br />
Die genauen technischen Daten sind hier zu finden:<br />
http://www.atmel.com/dyn/resources/prod_documents/doc7753.pdf<br />
12
4.2 Nachrüstung: Signallampe<br />
Das Signal der LED auf der <strong>SeBCON</strong>-<strong>µC</strong> lässt sich auch nach Außen zu einer externen Lampe führen.<br />
Dazu muss ein zusätzliches (Masse-) Kabel an L1 auf der Platine angelötet werden. Natürlich muss<br />
dann noch ein weiteres Kabel von der Signallampe an +12V gelegt werden.<br />
Die Lampe kann z.B. in der linken Instrumentenleiste angebracht werden oder es wird ein freies<br />
Symbol im Kombiistrument verwendet. Dazu muss dann aber die Fassung des Birnchens aufbereitet<br />
werden, damit diese auch die zusätzlichen Kabel aufnehmen kann.<br />
Abbildung 13: Zusätzliches Kabel für eine Signallampe<br />
Abbildung 14: Signallampe rechts<br />
Abbildung 15: Eine Signallampe im Kombiistrument 14<br />
14 Dies ist die dritte Lampe von Links im Kombiistrument<br />
13
4.2.1 Programmierung<br />
Die Lampe arbeitet sofort, da im Programm der Verkaufsversion schon eine Signalausgabe<br />
programmiert ist. Hier ein Codeschnipsel:<br />
'comments<br />
Portb.3 = 0 'solenoid off<br />
Portb.4 = 1 'lamp on, show that the box is alive<br />
Waitms 3000 'just let the Car-ECU bootup<br />
Portb.4 = 0 'lamp off<br />
Es gibt ein Signal wenn „Klopfen“ registriert wird, dann Leuchtet die LED bzw. die externe<br />
Statuslampe mit maximaler Helligkeit, weiterhin glimmt die LED/Statuslampe auch während der<br />
Antaktung des Solenoiden, je heller die Statuslampe umso stärker die Taktung.<br />
Die Programmierung kann bspw. so angepasst werden, dass die Signallampe im Betrieb nur dann<br />
leuchtet, wenn ein Klopfen registriert wird.<br />
4.3 Andere Solenoiden<br />
<strong>Für</strong> die Verwendung anderer Solenoiden als den empfohlenen vom V70 muss ggf. die Last-Map<br />
angepasst werden, wenn die Regelweite des Potis für einen erhöhten Ladedruck nicht ausreicht.<br />
Dies gilt auch für den Solenoiden vom T+ Kit.<br />
Pierburg: 7.21559.00 12V DC 0032 / <strong>Volvo</strong> Part: 3517757 -<br />
from the original <strong>Volvo</strong> Turbo+Kit (B204<strong>FT</strong> and B<strong>230</strong><strong>FT</strong>)<br />
Abbildung 16: Solenoid vom T+ Kit<br />
Übersicht weiterer Solenoiden von Pierburg:<br />
http://www.ms-motor-service.com/ximages/PDF_Kataloge/pg_aa02_elventil_web.pdf<br />
14
4.3.1 Programmierung<br />
Vorschlag zur Anpassung der Last-MAP:<br />
Dim Bmap(60) As Byte 'Bmap with 60 fields<br />
'<br />
Bmap(1) = 93 '1100rpm<br />
Bmap(2) = 93 '1200rpm<br />
Bmap(3) = 93 '1300rpm<br />
Bmap(4) = 93 '1400rpm<br />
Bmap(5) = 93 '1500rpm<br />
Bmap(6) = 93 '1600rpm<br />
Bmap(7) = 93 '1700rpm<br />
Bmap(8) = 93 '1800rpm<br />
Bmap(9) = 93 '1900rpm<br />
'2000<br />
Bmap(10) = 93 '2000rpm<br />
Bmap(11) = 93 '2100rpm<br />
Bmap(12) = 93 '2200rpm<br />
Bmap(13) = 93 '<strong>230</strong>0rpm<br />
Bmap(14) = 93 '2400rpm<br />
Bmap(15) = 93 '2500rpm<br />
Bmap(16) = 94 '2600rpm<br />
Bmap(17) = 94 '2700rpm<br />
Bmap(18) = 95 '2800rpm<br />
Bmap(19) = 95 '2900rpm<br />
'3000<br />
Bmap(20) = 96 '3000rpm<br />
Bmap(21) = 97 '3100rpm<br />
Bmap(22) = 98 '3200rpm<br />
Bmap(23) = 99 '3300rpm<br />
Bmap(24) = 100 '3400rpm<br />
Bmap(25) = 100 '3500rpm<br />
Bmap(26) = 100 '3600rpm<br />
Bmap(27) = 100 '3700rpm<br />
Bmap(28) = 100 '3800rpm<br />
Bmap(29) = 100 '3900rpm<br />
'4000<br />
Bmap(30) = 100 '4000rpm<br />
Bmap(31) = 100 '4100rpm<br />
Bmap(32) = 100 '4200rpm<br />
Bmap(33) = 100 '4300rpm<br />
Bmap(34) = 100 '4400rpm<br />
Bmap(35) = 100 '4500rpm<br />
Bmap(36) = 100 '4600rpm<br />
Bmap(37) = 100 '4700rpm<br />
Bmap(38) = 100 '4800rpm<br />
Bmap(39) = 99 '4900rpm<br />
'5000<br />
Bmap(40) = 98 '5000rpm<br />
Bmap(41) = 97 '5100rpm<br />
Bmap(42) = 97 '5200rpm<br />
Bmap(43) = 96 '5300rpm<br />
Bmap(44) = 96 '5400rpm<br />
Bmap(45) = 95 '5500rpm<br />
Bmap(46) = 95 '5600rpm<br />
Bmap(47) = 95 '5700rpm<br />
Bmap(48) = 95 '5800rpm<br />
Bmap(49) = 95 '5900rpm<br />
'6000<br />
Bmap(50) = 95 '6000rpm<br />
Bmap(51) = 95 '6100rpm<br />
Bmap(52) = 95 '6200rpm<br />
Bmap(53) = 95 '6300rpm<br />
Bmap(54) = 95 '6400rpm<br />
Bmap(55) = 95 '6500rpm<br />
Bmap(56) = 95 '6600rpm<br />
Bmap(57) = 95 '6700rpm<br />
Bmap(58) = 95 '6800rpm<br />
Bmap(59) = 95 '6900rpm<br />
'7000<br />
Bmap(60) = 95 '7000rpm<br />
15
5 Technische Daten<br />
5.1 Platine<br />
Abbildung 17: Platinenlayout mit handschriftlichen Informationen<br />
Abbildung 18: Platine mit Bauteilen<br />
16
5.2 ATMEL AVRmicro ATtiny461<br />
Abbildung 19: Anschlüsse des verwendeten IC`s<br />
Technische Daten: http://www.atmel.com/dyn/resources/prod_documents/doc7753.pdf<br />
5.3 Schaltplan LH Jetronic 2.4<br />
Farblegende der Kabelfarben:<br />
Legende<br />
BL blue<br />
BN brown<br />
GR gray<br />
OR orange<br />
P pink<br />
R red<br />
SB black<br />
VO violett<br />
Y yellow<br />
R / W red / white<br />
W / SB white / black<br />
17
Abbildung 20: Schaltplan LH 2.4 / EZK-116<br />
18
6 Programmcode der Verkaufsversion<br />
Mit Stand 10.01.2010 wird die <strong>SeBCON</strong>-<strong>µC</strong> mit der Programmversion 1.24a verkauft.<br />
Programmcode:<br />
-------------------------------------------------------------------------------------------------------------------------<br />
'comments<br />
'------------------------------------------------------------<br />
' ATTINY461 <strong>SeBCON</strong>-uC file Release 1.24 / 016+012 LMM<br />
'------------------------------------------------------------<br />
$regfile = "attiny461.dat"<br />
$crystal = 8000000<br />
'default CKDIV8 = on, 1000000<br />
'this values must be set --> CKDIV8 = off, 8000000<br />
'-------------------------------------------------------------------------------------<br />
'PA0 = BOOSTLEVEL POTI SIGNAL<br />
'PA1 = LINE INPUT SIGNAL<br />
'PA2 = VOLTAGE RPM SIGNAL<br />
'PA3 = AVCC<br />
'PA4 = INJECTOR LOAD SIGNAL<br />
Config Porta.5 = Input 'KNOCKSIGNAL<br />
'PA6 = MANUAL OVERBOOST SIGNAL<br />
'PA7 = TEMPERATURE SENSOR<br />
'-------------------------------------------------------------------------------------<br />
'PB0 = MOSI<br />
'PB1 = MISO<br />
'PB2 = SCK<br />
Config Portb.3 = Output 'OUTPUT SOLENOID SIGNAL<br />
Config Portb.4 = Output 'OUTPUT STATUS LED/LAMP 500mA<br />
'Config Portb.5 = Free In/Output/ADC8<br />
'Config Portb.6 = Free In/Output/ADC9<br />
'PB7 = RESET<br />
'-------------------------------------------------------------------------------------<br />
Dim Puls As Integer 'PWM online time<br />
Dim Pause As Integer 'PWM offline time<br />
Dim Pot As Integer 'Pot<br />
Dim Lin As Integer 'Lin<br />
Dim Inj As Integer 'Inj<br />
Dim Swi As Integer 'Swi<br />
Dim Var0 As Byte 'misc variable<br />
Dim Var1 As Byte 'misc variable<br />
Dim Bmapval As Integer 'boost map value<br />
Dim Lmapval As Integer 'load map value<br />
Dim Temp As Byte 'map/rpm value var<br />
Dim Bval As Long 'Boost value var<br />
Dim Field As Integer 'field/map var<br />
Dim Conv As Byte 'conversion var<br />
Dim Knkc As Byte 'knock counter<br />
Dim Kbr As Byte 'Knock Boost reduction<br />
Dim Mlred As Integer 'max-load reduction<br />
'- additional features<br />
Dim Map As Byte 'map sensor<br />
Dim Cat As Byte 'charge air temperature<br />
Dim Etmp As Byte 'engine temperature<br />
'-------------------------------------------------------------------------------------<br />
Config Adc = Single , Prescaler = Auto<br />
Start Adc<br />
'-------------------------------------------------------------------------------------<br />
'--<br />
'Values in the map are the difference in % from the auto-value. If you set as value 80,<br />
'then you will get 80% from the auto-value. It's not possible to modify the auto-value<br />
'because this signal is hardware generated out of the injector signal.<br />
'--<br />
Dim Bmap(60) As Byte 'Bmap with 60 fields<br />
'<br />
Bmap(1) = 0 '1100rpm<br />
Bmap(2) = 96 '1200rpm<br />
Bmap(3) = 94 '1300rpm<br />
Bmap(4) = 92 '1400rpm<br />
Bmap(5) = 90 '1500rpm<br />
Bmap(6) = 88 '1600rpm<br />
Bmap(7) = 86 '1700rpm<br />
Bmap(8) = 84 '1800rpm<br />
Bmap(9) = 82 '1900rpm<br />
'2000<br />
19
Bmap(10) = 80 '2000rpm<br />
Bmap(11) = 81 '2100rpm<br />
Bmap(12) = 82 '2200rpm<br />
Bmap(13) = 83 '<strong>230</strong>0rpm<br />
Bmap(14) = 84 '2400rpm<br />
Bmap(15) = 85 '2500rpm<br />
Bmap(16) = 86 '2600rpm<br />
Bmap(17) = 87 '2700rpm<br />
Bmap(18) = 88 '2800rpm<br />
Bmap(19) = 89 '2900rpm<br />
'3000<br />
Bmap(20) = 90 '3000rpm<br />
Bmap(21) = 91 '3100rpm<br />
Bmap(22) = 92 '3200rpm<br />
Bmap(23) = 93 '3300rpm<br />
Bmap(24) = 94 '3400rpm<br />
Bmap(25) = 96 '3500rpm<br />
Bmap(26) = 98 '3600rpm<br />
Bmap(27) = 100 '3700rpm<br />
Bmap(28) = 100 '3800rpm<br />
Bmap(29) = 100 '3900rpm<br />
'4000<br />
Bmap(30) = 100 '4000rpm<br />
Bmap(31) = 100 '4100rpm<br />
Bmap(32) = 100 '4200rpm<br />
Bmap(33) = 100 '4300rpm<br />
Bmap(34) = 100 '4400rpm<br />
Bmap(35) = 100 '4500rpm<br />
Bmap(36) = 100 '4600rpm<br />
Bmap(37) = 100 '4700rpm<br />
Bmap(38) = 100 '4800rpm<br />
Bmap(39) = 100 '4900rpm<br />
'5000<br />
Bmap(40) = 98 '5000rpm<br />
Bmap(41) = 97 '5100rpm<br />
Bmap(42) = 96 '5200rpm<br />
Bmap(43) = 94 '5300rpm<br />
Bmap(44) = 92 '5400rpm<br />
Bmap(45) = 90 '5500rpm<br />
Bmap(46) = 89 '5600rpm<br />
Bmap(47) = 88 '5700rpm<br />
Bmap(48) = 87 '5800rpm<br />
Bmap(49) = 86 '5900rpm<br />
'6000<br />
Bmap(50) = 85 '6000rpm<br />
Bmap(51) = 85 '6100rpm<br />
Bmap(52) = 85 '6200rpm<br />
Bmap(53) = 85 '6300rpm<br />
Bmap(54) = 85 '6400rpm<br />
Bmap(55) = 85 '6500rpm<br />
Bmap(56) = 85 '6600rpm<br />
Bmap(57) = 85 '6700rpm<br />
Bmap(58) = 85 '6800rpm<br />
Bmap(59) = 85 '6900rpm<br />
'7000<br />
Bmap(60) = 85 '7000rpm<br />
'-------------------------------------------------------------------------------------<br />
'--> Maximum allowed Engine Load Map<br />
'Value in the map represents the maximum allowed engine load in the specified rmp field.<br />
'min value = 0, max value = 236. (max. value 236 = Inj.time = 100%)<br />
'--<br />
Dim Elmap(60) As Byte 'Map with 60 fields<br />
'-<br />
Do<br />
Incr Var0<br />
If Var0 < 21 Then Elmap(var0) = 210 Else Elmap(var0) = 236<br />
Loop Until Var0 > 59<br />
'-------------------------------------------------------------------------------------<br />
'set/read some values<br />
Portb.3 = 0<br />
Portb.4 = 1 'show that the box is alive<br />
Temp = 100<br />
Waitms 3000 'just let the Car-ECU bootup<br />
Portb.4 = 0<br />
'-------------------------------------------------------------------------------------<br />
Init:<br />
'disable <strong>SeBCON</strong> as long as the engine has not reached operation temperature<br />
'Get the engine temperature (32(128)= ~60degree engine temp , 18(72)= ~87degree) PA7<br />
20
If Getadc(6) > 75 Then Goto Init<br />
'-------------------------------------------------------------------------------------<br />
Do 'here we go<br />
'-------------------------------------------------------------------------------------<br />
Swi = Getadc(5)<br />
'-<br />
'ATtiny461 466=2.48V 911=4.85V 920=4.90V 926=4.93V 932=4.96V 933=4.97V 940=5.00V 950=5.05V 960=5.10V<br />
'Get value from line input (10Bit res. / 0-1023), Pin19, Lin<br />
Lin = Getadc(1) / 4<br />
'--<br />
'Get value from Injectors (10Bit res. / 0-1023), Pin14, PA4 (max. value = 236 / Inj.time = 100%)<br />
Inj = Getadc(3) / 4<br />
'-<br />
'Get value from Boost-Poti (10Bit res. / 0-1023)<br />
Pot = Getadc(0) / 4<br />
'-<br />
'-------------------------------------------------------------------------------------<br />
'-- Build value from the Inj.signal<br />
Bval = Inj<br />
'-- Build a mixed value out of the inj. and line signal / less boost if mixture is lean<br />
Bval = Bval * 4<br />
Lin = Lin * 2<br />
Bval = Bval + Lin<br />
Bval = Bval / 6<br />
'-------------------------------------------------------------------------------------<br />
'Get the rpm field<br />
'-<br />
'Bosch Jetronic ECU LH 2.4.x multipoint injection / two times inj during one complete engine cycle (2 revs)<br />
Field = Getadc(2) / 4<br />
'-------------------------------------------------------------------------------------<br />
Conv = Field / 3.5<br />
Conv = Conv - 10<br />
If Conv < 2 Then Conv = 1<br />
If Conv > 59 Then Conv = 60<br />
Bmapval = Bmap(conv)<br />
Lmapval = Elmap(conv)<br />
'-------------------------------------------------------------------------------------<br />
'Auto-Overboost (+0.15), activation depends on the engine load<br />
If Inj > 155 And Inj < 168 Then<br />
Var0 = Inj - 155<br />
'Portb.4 = 1<br />
Bmapval = Bmapval + Var0<br />
Elseif Inj > 167 Or Swi < 100 Then<br />
Bmapval = Bmapval + 12<br />
End If<br />
'-------------------------------------------------------------------------------------<br />
'prevents boost spiking (calm abrupt boostvalue corrections)<br />
If Inj < 70 Then Goto Pass_bmapval<br />
If Bmapval > Temp Then Bmapval = Temp + 1<br />
If Bmapval < Temp Then Bmapval = Temp - 1<br />
Temp = Bmapval<br />
Pass_bmapval:<br />
'-<br />
'Low Load Section - lower the boost during part load<br />
If Inj < 116 Then<br />
Bval = Bval * Inj<br />
Bval = Bval / 115<br />
Else<br />
End If<br />
'-<br />
If Inj < 70 Or Conv < 3 Then Bval = 0<br />
If Bval > 253 Then Bval = 254<br />
'Pass_dawes:<br />
'-<br />
If Inj > Lmapval Then 'if inj-value reaches the limit<br />
If Mlred < 13 Then Mlred = Mlred + 1 'increase reduction (max.corr. = -5% / (1% = 2.55))<br />
Portb.4 = 1 'set control-lamp<br />
Else 'else<br />
If Mlred > 0 Then Mlred = Mlred - 1 'reduce reduction<br />
End If<br />
'-<br />
'Final Boost calculation<br />
Bval = Bval * Bmapval 'corrected value from A/D<br />
Bval = Bval / 100<br />
'--<br />
Bval = Bval * Pot 'cur. boost value * adjusted boost<br />
Bval = Bval / 255<br />
'-<br />
21
'correct the final boost by the adaptive value<br />
Bval = Bval - Mlred<br />
'-------------------------------------------------------------------------------------<br />
'Get Knocksignal, 1=Knock (100ms), 0=Go, Pin13, PA5<br />
'if the input voltage is under 0.7V or over 9.0V then PINA.5 = 1 for 100ms<br />
'This signal feeds the dynamic knock correction map<br />
'We are passing through this section every ~34ms, means 30 times in 1 sec.<br />
If Knkc > 0 Then<br />
Knkc = Knkc - 1 'every step are -34ms<br />
Bval = Bval / 6<br />
Kbr = 30 'counter for knock boost reduction<br />
Goto Pass_knock 'pass knockdetection for 200ms<br />
Else<br />
End If<br />
'-<br />
'Pass This Section During Idle and low load (conv < 5 and inj < 100) / Inj > 100 is important for the BSR-Chip<br />
If Pina.5 = 1 And Conv > 4 And Inj > 130 Then 'Knock signal active<br />
Knkc = 6 '200ms counter starts here<br />
'-<br />
If Kbr > 0 Then Goto Pass_knock 'stop here, if we have a already used knocksignal<br />
Elmap(conv) = Elmap(conv) - 1 'lower the engine load map about 1 point<br />
Elmap(conv - 1) = Elmap(conv - 1) - 1<br />
Elmap(conv + 1) = Elmap(conv + 1) - 1<br />
'-<br />
Bval = 0 'set Bval for one cycle to 8<br />
'-<br />
Else 'no knocksignal<br />
End If<br />
'-<br />
Pass_knock:<br />
'-<br />
If Kbr > 0 Then 'if knock counter is active<br />
Bval = Bval / 2 'halved boost<br />
Kbr = Kbr - 1 'decrease counter for knock boost reduction<br />
Portb.4 = 1 'set control-lamp<br />
Else<br />
End If<br />
'-------------------------------------------------------------------------------------<br />
' Build PWM-Signal, output Pin4, PB3<br />
' parameters are adjusted to get a output frequency from 30Hz,<br />
' modifing the puls pause time will change the frequency<br />
If Bval > 253 Then Bval = 254<br />
If Bval < 1 Then Bval = 0<br />
Puls = Bval / 8<br />
If Puls > 30 Then Puls = 31<br />
If Puls < 1 Then Puls = 0<br />
Pause = 31 - Puls '<br />
'-- Solenoid off time<br />
Waitms Pause<br />
'-- Solenoid on time<br />
If Puls > 0 Then Portb.3 = 1<br />
If Puls > 0 Then Portb.4 = 1 Else Portb.4 = 0<br />
Waitms Puls<br />
'-- Solenoid off<br />
Portb.3 = 0<br />
Portb.4 = 0<br />
'-------------------------------------------------------------------------------------<br />
Loop<br />
End<br />
22
7 Fotodokumentationen<br />
Abbildung 21: <strong>SeBCON</strong>-<strong>µC</strong>-Programmierkabel (Adapter)<br />
Abbildung 22: <strong>SeBCON</strong>-<strong>µC</strong> Größendarstellung<br />
23
Abbildung 23: <strong>SeBCON</strong>-<strong>µC</strong> Kabelkonfektion 1<br />
Abbildung 24: <strong>SeBCON</strong>-<strong>µC</strong> Kabelkonfektion 2<br />
Abbildung 25: <strong>SeBCON</strong>-<strong>µC</strong> Kabelkonfektion 3<br />
Abbildung 26: <strong>SeBCON</strong>-<strong>µC</strong> Kabelkonfektion 4<br />
24
Abbildung 27: LH-Platine mit angelöteten Kabeln<br />
Gelbes Kabel: Luftmassenmesser<br />
Oranges Kabel: Motortemperatursensor<br />
Grün-Braunes Kabel: Injektoren<br />
Abbildung 28: LH mit Kabelanschlüssen<br />
8 Quellen<br />
Anbieter der <strong>SeBCON</strong>-<strong>µC</strong>:<br />
www.stonis-world.net/<strong>SeBCON</strong>/index.html<br />
Elektrische Ventile von Pierburg<br />
http://www.ms-motor-service.com/ximages/PDF_Kataloge/pg_aa02_elventil_web.pdf<br />
Serielle Schnittstelle (RS232 / V.24 / COM)<br />
www.elektronik-kompendium.de/sites/com/0310301.htm<br />
BASCOM-AVR Compiler<br />
www.mcselec.com<br />
PonyProg Serial Device Programmer<br />
http://ponyprog.sourceforge.net<br />
http://s-huehn.de/elektronik/avr-prog/avr-prog.htm<br />
Technische Daten des Mikrocontrollers ATtiny461<br />
http://www.atmel.com/dyn/resources/prod_documents/doc7753.pdf<br />
Homepage von aimypost:<br />
www.b<strong>230</strong>fk.de<br />
25
9 Abbildungsverzeichnis<br />
Abbildung 1: Empfohlener Solenoid ..........................................................4<br />
Abbildung 2: Größendarstellung der <strong>SeBCON</strong>-<strong>µC</strong> ...........................................5<br />
Abbildung 3: Stecker am rechten Federbeindom (ab Mj94-) .............................7<br />
Abbildung 4: Kabelbelegung der Stecker am rechten Federbeindom (ab Mj94-)......7<br />
Abbildung 5: Stecker am rechten Federbeindom (bis Mj93)..............................8<br />
Abbildung 6: RS-232 Adapterkabel von Pfostenstecker auf DB9 .........................9<br />
Abbildung 7: D-Sub, serielles Datenkabel mit DB9 BU/BU ................................9<br />
Abbildung 8: <strong>SeBCON</strong>-<strong>µC</strong>-Programmierkabel .............................................. 10<br />
Abbildung 9: PIN-Belegung des <strong>SeBCON</strong>-<strong>µC</strong>-Programmierkabels....................... 10<br />
Abbildung 10: Auswahl des Mikrocontroller ............................................... 11<br />
Abbildung 11: Einstellung des COM-Ports.................................................. 11<br />
Abbildung 12: Kalibrierung der Ports....................................................... 11<br />
Abbildung 13: Zusätzliches Kabel für eine Signallampe ................................. 13<br />
Abbildung 14: Signallampe rechts .......................................................... 13<br />
Abbildung 15: Eine Signallampe im Kombiistrument..................................... 13<br />
Abbildung 16: Solenoid vom T+ Kit ......................................................... 14<br />
Abbildung 17: Platinenlayout mit handschriftlichen Informationen................... 16<br />
Abbildung 18: Platine mit Bauteilen........................................................ 16<br />
Abbildung 19: Anschlüsse des verwendeten IC`s ......................................... 17<br />
Abbildung 20: Schaltplan LH 2.4 / EZK-116 ............................................... 18<br />
Abbildung 21: <strong>SeBCON</strong>-<strong>µC</strong>-Programmierkabel (Adapter)................................ 23<br />
Abbildung 22: <strong>SeBCON</strong>-<strong>µC</strong> Größendarstellung............................................ 23<br />
Abbildung 23: <strong>SeBCON</strong>-<strong>µC</strong> Kabelkonfektion 1 ............................................. 24<br />
Abbildung 24: <strong>SeBCON</strong>-<strong>µC</strong> Kabelkonfektion 2 ............................................. 24<br />
Abbildung 25: <strong>SeBCON</strong>-<strong>µC</strong> Kabelkonfektion 3 ............................................. 24<br />
Abbildung 27: <strong>SeBCON</strong>-<strong>µC</strong> Kabelkonfektion 4 ............................................ 24<br />
Abbildung 29: LH-Platine mit angelöteten Kabeln ....................................... 25<br />
Abbildung 30: LH mit Kabelanschlüssen ................................................... 25<br />
26