PR ¨UFUNG TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik
PR ¨UFUNG TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik
PR ¨UFUNG TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
PSfrag replacements<br />
a<br />
1. Aufgabe: (<strong>TM</strong>, E<strong>TM</strong>)<br />
D<br />
ERGEBNISSE<br />
<strong>PR</strong>ÜFUNG <strong>TM</strong> I,<strong>II</strong> <strong>UND</strong> E<strong>TM</strong> I,<strong>II</strong><br />
<strong>Lehrstuhl</strong> <strong>für</strong> <strong>Technische</strong> <strong>Mechanik</strong>, TU Kaiserslautern<br />
a<br />
Prof. Dr.-Ing. P. Steinmann<br />
2a a<br />
SS 2006 02.09.2006<br />
3m<br />
A B<br />
C<br />
S1 S2 S3<br />
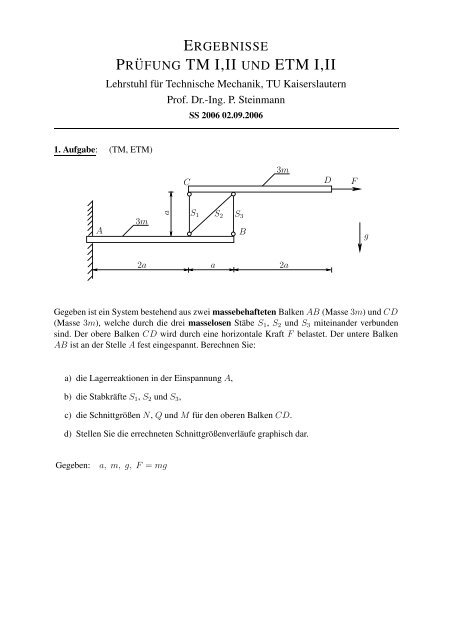
Gegeben ist ein System bestehend aus zwei massebehafteten Balken AB (Masse 3m) und CD<br />
(Masse 3m), welche durch die drei masselosen Stäbe S1, S2 und S3 miteinander verbunden<br />
sind. Der obere Balken CD wird durch eine horizontale Kraft F belastet. Der untere Balken<br />
AB ist an der Stelle A fest eingespannt. Berechnen Sie:<br />
a) die Lagerreaktionen in der Einspannung A,<br />
b) die Stabkräfte S1, S2 und S3,<br />
3m<br />
c) die Schnittgrößen N, Q und M <strong>für</strong> den oberen Balken CD.<br />
d) Stellen Sie die errechneten Schnittgrößenverläufe graphisch dar.<br />
Gegeben: a, m, g, F = mg<br />
2a<br />
D<br />
F<br />
g
a) Ax = −mg, Az = 6 mg, MA = −16 mg a<br />
b) S1 = − 3<br />
2 mg, S2 = − √ 2 mg, S3 = 11<br />
2 mg<br />
c)<br />
d)<br />
Bereich I: 0 ≤ x < a<br />
NI(x) = 0, QI(x) = − 3 mg<br />
mg −<br />
2 a x, MI(x) = − 3 1 mg<br />
mg x −<br />
2 2 a x2<br />
Bereich <strong>II</strong>: a ≤ x < 3a<br />
N<strong>II</strong>(x) = mg, Q<strong>II</strong>(x) = 3 mg − mg<br />
a x, M<strong>II</strong>(x) = 3 mg x − 1 mg<br />
2 a x2 − 9<br />
mg a<br />
2<br />
PSfrag replacements<br />
a<br />
√ 3 mg<br />
N(x)<br />
Q(x)<br />
− 3<br />
2 mg<br />
M(x)<br />
⊖<br />
⊖<br />
2 mg<br />
⊕<br />
− 5<br />
2 mg<br />
−2 mga<br />
⊕<br />
mg
2. Aufgabe: (<strong>TM</strong>, E<strong>TM</strong>)<br />
PSfrag replacements<br />
F = ?<br />
µ<br />
µ<br />
α<br />
α<br />
➁<br />
Gegeben sei obiges System aus zwei masselosen Körpern ➀, ➁. Alle Kontakte zwischen Körpern<br />
sowie Körpern und Wänden seien, wie dargestellt, reibungsbehaftet mit dem Haftreibungskoeffizienten<br />
µ. Die Kräfte G und F greifen an den Körpern ➀ und ➁ so an, dass kein Kippen<br />
auftritt. Berechnen Sie<br />
a) die in dem System auftretenden Normalkräfte sowie in Abhängigkeit von diesen die Kraft<br />
Fmin, die mindestens nötig ist, um ein Herabsinken von Körper ➀ zu verhindern;<br />
b) die mindestens erforderliche Kraft Fmax, um Körper ➀ anzuheben!<br />
c) Bestimmen Sie α so, dass <strong>für</strong> beliebig gegebenes µ Selbsthemmung vorliegt, d.h. dass<br />
F = 0 <strong>für</strong> beliebige G gilt !<br />
Gegeben: G = 15 kN , µ = 0.2 , α = 20 ◦<br />
Hinweis: sin α · cos α = 1<br />
sin 2α<br />
2<br />
G<br />
➀<br />
α<br />
µ
a)<br />
b)<br />
sin α − µ cos α<br />
N1 = G<br />
1 − µ 2<br />
= 2.41 kN<br />
cos α − µ sin α<br />
N2 = G<br />
1 − µ 2 = 13.61 kN<br />
cos<br />
N3 = G<br />
2 α − µ 2 sin 2 α<br />
sin α[µ − µ 3 ] + cos α[1 − µ 2 ] = N2 = 13.61 kN,<br />
Fmin = 2 N2[sin α − µ cos α]<br />
= 2G sin α cos α + µ2 sin α cos α − µ<br />
1 − µ 2<br />
Fmax = 2G sin α cos α + µ2 sin α cos α + µ<br />
1 − µ 2<br />
c) Trivial: α = 0 <strong>für</strong> alle µ<br />
Allgemeiner muß unter der Nebenbedingung µ 2 = 1<br />
gelten. Also<br />
0 ! = 2 sin α cos α + 2µ 2 sin α cos α − 2µ<br />
α = 1<br />
2 arcsin<br />
<br />
2µ<br />
1 + µ 2<br />
<br />
= 4.19 kN<br />
= 14.43 kN
3. Aufgabe: (<strong>TM</strong>)<br />
PSfrag replacements<br />
A<br />
2a<br />
x<br />
F<br />
¡ ¡ ¡ ¡ ¢¡¢¡¢¡¢<br />
¢¡¢¡¢¡¢ ¡ ¡ ¡ ¡<br />
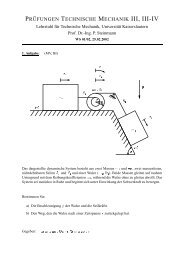
Das dargestellte masselose System ist in A und B gelenkig gelagert und durch zwei Kräfte<br />
beansprucht, wobei die horizontale Kraft als verschieblich anzusehen ist.<br />
Berechnen Sie:<br />
a) die horizontale Auflagerreaktion in A mit dem Prinzip der virtuellen Verschiebungen;<br />
b) die vertikale Auflagerreaktion in B mit dem Prinzip der virtuellen Verschiebungen.<br />
Gegeben: a, b, x, F<br />
Anmerkung: Sämtliche Verschiebungsbilder und kinematische Beziehungen sind anzugeben.<br />
Eine Lösung der Aufgabe mit Gleichgewichtsbedingungen wird nicht bewertet.<br />
<br />
a + x<br />
a) Ax =<br />
b<br />
b) By = F<br />
<br />
− 1 F<br />
a<br />
F<br />
a<br />
B<br />
b
4. Aufgabe: (<strong>TM</strong>, E<strong>TM</strong>)<br />
PSfrag replacements<br />
e<br />
1<br />
50l ∆T<br />
2a a<br />
A B<br />
C<br />
EA1, α1<br />
EA2, α2<br />
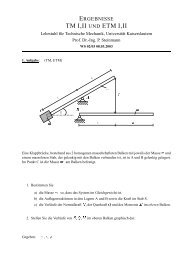
Auf zwei masselosen gleichen Stützen (Länge l, Dehnsteifigkeit EA1 = EA2 = EA, Wärmeausdehnungskoeffizient<br />
α1 = α2 = α) liegt ein masseloser starrer Balken, der im Punkt C<br />
in der abgebildeten Weise drehbar gelagert ist. Der Balken hat zu den Lagern A und B den<br />
Abstand e.<br />
a) Geben Sie das Verhältnis der Längenänderungen der beiden Stützen an, wenn der Balken<br />
aus der dargestellten (spannungsfreien) Lage bewegt wird und das Verhältnis der Stabkräfte<br />
<strong>für</strong> den Gleichgewichtsfall.<br />
b) Berechnen Sie die Stabkräfte in den Stützen bei einer Erwärmung der Stützen um ∆T .<br />
c) Bei welcher Temperaturänderung ∆Ta gegenüber der dargestellten (spannungsfreien) Lage<br />
berührt der Balken das Lager im Punkt A.<br />
d) Bei welcher Temperaturänderung ∆Tb gegenüber der dargestellten (spannungsfreien) Lage<br />
berührt der Balken das Lager im Punkt B.<br />
Gegeben: a , l , EA1 = EA2 = EA , α1 = α2 = α, e = 1<br />
50 l<br />
Wichtig: Die Abbildung ist nicht maßstabsgetreu !<br />
∆T<br />
l
a)<br />
b)<br />
δB = − δA<br />
2<br />
oder δA = −2 δB<br />
S1 = − 3<br />
α · ∆T · EA<br />
5<br />
S2 = 2 · S1 = − 6<br />
α · ∆T · EA (1)<br />
5<br />
PSfrag replacements<br />
S1<br />
∆T<br />
S1<br />
A B<br />
C<br />
δA<br />
c) Erklärung: Bei einer Erwärmung um ∆TA wollen sich beide Stäbe ausdehnen. Aufgrund<br />
der Geometrie ist dies jedoch nur <strong>für</strong> Stab S1 mit dem größeren Hebelarm möglich und<br />
der Stab S2 wird nach unten gedrückt.<br />
∆TA = 1<br />
20 α<br />
d) Erklärung: Bei einer Abkühlung um ∆TB wollen sich beide Stäbe zusammenziehen. Aufgrund<br />
der Geometrie ist dies jedoch nur <strong>für</strong> Stab S1 mit dem größeren Hebelarm möglich<br />
und der Stab S2 wird nach oben gezogen.<br />
∆TB = − 1<br />
10 α<br />
S2<br />
δB<br />
∆T<br />
S2<br />
(2)<br />
(3)
PSfrag replacements<br />
5. Aufgabe: (<strong>TM</strong>)<br />
<br />
<br />
¥¤¥ ¦¤¦¤¦ £¤£ §¤§¤§ ©¤©¤© ¨¤¨¤¨ ¤¤ ¤¤ ¦¤¦¤¦ §¤§¤§ <br />
<br />
©¤©¤© ¨¤¨¤¨ ¤¤ ¤¤<br />
¤¤ ¤¤ ¤¤ ¤¤ ¤¤<br />
¤¤ ¤¤ ¤¤ ¤¤<br />
¤¤ ¤ ¤ ¤¤ ¤¤<br />
<br />
<br />
A B<br />
x<br />
a b<br />
Ein masseloser Balken (Biegesteifigkeit EI) ist wie dargestellt im Punkt A vertikal verschieblich<br />
eingespannt und in Punkt B horizonal verschieblich gelagert und durch die Streckenlast q<br />
belastet. Berechnen Sie<br />
a) die Auflagerreaktionen in A und B,<br />
b) den Biegemomentenverlauf in Abhängigkeit der gegebenen Koordinate x,<br />
c) den allgemeinen Verlauf der Biegelinie, sowie die notwendigen Rand- und Übergangsbedingungen<br />
zur Bestimmung der Integrationskonstanten. Die Integrationskonstanten selbst<br />
müssen nicht bestimmt werden.<br />
d) das Verhältnis der Strecken a : b so, dass sich der Balken im Lager A nicht durchbiegt.<br />
Skizzieren Sie zugehörige Biegelinie.<br />
Gegeben: q, a, b, EI<br />
a) A = 0 , B = q[a + b] , MA = 1<br />
2 q[b2 − a 2 ]<br />
b) Bereich I (0 ≤ x ≤ a): MI(x) = − 1<br />
2 q x 2 − [a 2 − b 2 ] <br />
Bereich <strong>II</strong> (a ≤ x ≤ a + b): M<strong>II</strong>(x) = − 1<br />
2 q x 2 − 2[a + b]x + [a + b] 2<br />
c) EIwI = 1<br />
2 q<br />
<br />
1<br />
12 x4 − 1<br />
2 [a2 − b 2 ]x 2<br />
<br />
+ C1x + C2<br />
EIw<strong>II</strong> = 1<br />
2 q<br />
<br />
1<br />
12 x4 − 1<br />
3 [a + b]x3 + 1<br />
2 [a + b]2x 2<br />
<br />
+ D1x + D2<br />
4 Rand-und Übergansbedingungen:<br />
w ′ I (0) = 0 , wI(a) = 0 , w ′ <strong>II</strong> (a) = w′ I (a) , w<strong>II</strong>(a) = 0<br />
d) a<br />
b =<br />
<br />
6<br />
5<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
q
6. Aufgabe: (E<strong>TM</strong>, <strong>TM</strong><strong>II</strong>)<br />
PSfrag replacements<br />
A<br />
A<br />
A<br />
ϕ<br />
a<br />
a<br />
C<br />
Der dargestellte masselose Träger (Dehnsteifigkeit EA, Biegesteifigkeit EI), ist in A und B<br />
wie abgebildet gelagert und wird in Punkt C durch eine vertikale Kraft F belastet.<br />
Bestimmen Sie:<br />
a) die Auflagerraktionen in A und B,<br />
b) die vertikale Verschiebung von C,<br />
c) die vertikale Verschiebung von B<br />
Gegeben: F, a, EI, EA<br />
Anmerkung: Im Bogenträger sind nur die Energieanteile infolge des Biegemomentes zu<br />
berücksichtigen.<br />
<br />
<br />
<br />
sin 2 (x)dx = 1 1<br />
x − sin 2x<br />
2 4<br />
cos 2 (x)dx = 1 1<br />
x + sin 2x<br />
2 4<br />
sin(x) cos(x)dx = 1<br />
2 sin2 (x)<br />
B<br />
F<br />
a<br />
a
2 F<br />
a) B =<br />
π , AH<br />
2 F<br />
=<br />
π , AV<br />
<br />
2<br />
= F, MA = − 1 F a<br />
π<br />
b) vC = a2<br />
<br />
3π<br />
F − 2 −<br />
EI 4 1<br />
<br />
+<br />
π<br />
a<br />
EA F<br />
c) vB = a2<br />
<br />
3π<br />
F − 2 −<br />
EI 4 1<br />
<br />
π
7. Aufgabe: (E<strong>TM</strong>)<br />
PSfrag replacements<br />
A<br />
1<br />
B<br />
2<br />
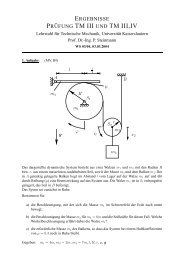
Die starren Stangen 1, 2 und 3 mit den Längen l1, l2 und l3 sind in A, B, C und D gelenkig<br />
gelagert. Der Stab 3 rotiert von der horizontalen Lage aus um den Punkt D im Uhrzeigersinn<br />
mit α(t) = 1<br />
3 t2 . Auf dem Stab 3 befindet sich der reibungsfrei gelagerte Reifen R, der während<br />
dieser Bewegung vom Punkt C her abrutscht. Dabei legt er den Weg s(t) = l3<br />
4 t2 zurück.<br />
a) Zeichnen Sie die Geschwindigkeitspfeile vB und vC und bestimmen Sie grafisch den Momentanpol<br />
der Stange 2.<br />
b) Bestimmen Sie die Geschwindigkeitskomponenten vr und vϕ des Reifens R in Abhängigkeit<br />
der Zeit.<br />
c) Bestimmen Sie die Beschleunigungskomponenten ar und aϕ des Reifens R in Abhängigkeit<br />
der Zeit.<br />
d) Berechnen Sie den Betrag der Geschwindigkeit v(α) des Reifens R <strong>für</strong> α = 30 ◦ .<br />
e) Bei welchem Winkel αE kommt der Reifen im Punkt D an?<br />
Gegeben: l1, l2, l3, α(t) = 1<br />
3 t2 , s(t) = l3<br />
4 t2<br />
C<br />
R<br />
α<br />
s<br />
3<br />
D<br />
er<br />
eϕ
a)<br />
PSfrag replacements<br />
vR<br />
A<br />
B<br />
b) vr(t) = l3<br />
2 t, vϕ(t) = l3<br />
6 t3<br />
c) ar(t) = l3<br />
2 , aϕ(t) = 5l3<br />
6 t2<br />
d) vR1 =<br />
1<br />
<br />
v 2 r + v 2 ϕ =<br />
e) αE(2s) = 76, 4 ◦<br />
l3<br />
vB<br />
1, 25<br />
2<br />
2<br />
+<br />
2<br />
MP<br />
2 l3<br />
1, 253<br />
6<br />
R<br />
C<br />
vC<br />
α<br />
s<br />
3<br />
D
8. Aufgabe: (E<strong>TM</strong> I)<br />
<br />
PSfrag replacements<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
m1<br />
x1<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
α<br />
µ<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Das dargestellte System besteht aus zwei Körpern (m1, m4), zwei homogenen Walzen (m2, R2,<br />
m3, R3) und zwei masselosen dehnstarren Seilen. Zwischen Masse m1 und schiefer Ebene wirkt<br />
der Haft–und Gleitreibungskoeffizient µ = µH = µG.<br />
g<br />
a) Bestimmen Sie die Beschleunigung ¨x1 der Masse m1, wenn sich die Masse m1 in positive<br />
x1–Richtung bewegt.<br />
b) Bestimmen Sie die Seilkraft an der Masse m1.<br />
c) Wie groß muss µ sein, so dass das System in Ruhe bleibt? Wie groß ist in diesem Fall die<br />
Seilkraft an der Masse m1?<br />
Gegeben: α = 30 ◦ , µ = µG = µH, m1 = 3 m, m2 = m3 = m4 = m, R2 = R3 = R, g<br />
Anmerkung: Verwenden Sie die angegebenen Koordinaten.<br />
a) ¨x1 = 1<br />
6 (1 − √ 3 µ) g<br />
b) S1 = m g (2 + √ 3 µ)<br />
c) µ = 1<br />
√ 3 ≈ 0.57735 S1 = 3 m g<br />
m2<br />
R2<br />
m3<br />
ϕ2<br />
R3<br />
ϕ3<br />
m4<br />
x3<br />
x4