PR ¨UFUNG TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik
PR ¨UFUNG TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik
PR ¨UFUNG TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
ERGEBNISSE<br />
<strong>PR</strong>ÜFUNG <strong>TM</strong> I,<strong>II</strong> <strong>UND</strong> E<strong>TM</strong> I,<strong>II</strong><br />
<strong>Lehrstuhl</strong> <strong>für</strong> <strong>Technische</strong> <strong>Mechanik</strong>, TU Kaiserslautern<br />
SS 2009 29.08.2009<br />
1. Aufgabe: (<strong>TM</strong> I-<strong>II</strong>, <strong>TM</strong>I, E<strong>TM</strong> I-<strong>II</strong>, E<strong>TM</strong> I)<br />
g<br />
01<br />
01<br />
01<br />
01<br />
F<br />
A<br />
01<br />
01<br />
01<br />
S<br />
l<br />
l<br />
m1<br />
ϕ<br />
as<br />
B 01<br />
C<br />
01<br />
00 11<br />
01<br />
00 11<br />
00 11<br />
01<br />
00 11<br />
01<br />
x<br />
00 11<br />
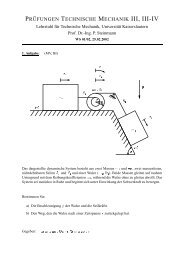
Das dargestellte massebehaftete Tragwerk besteht aus einem Bogenträger, der im Punkt B mit<br />
einem Balken gelenkig verbunden ist.<br />
Im Punkt A ist das Tragwerk durch die horizontale Kraft F belastet.<br />
Bestimmen Sie<br />
a) die Auflagerreaktionen in A und C, sowie die Gelenkreaktionen in B,<br />
b) die Schnittgrößenfunktionen N(x), Q(x) und M(x) im Balken BC bezüglich der gegebenen<br />
Koordinate x,<br />
c) den Momentenverlauf M(ϕ) im Bogenträger AB bezüglich der gegebenen Koordinate ϕ.<br />
Gegeben: F, l, m, m1 = 1<br />
2 m, m2 = 2m<br />
Hinweis: Der Linienschwerpunkt S eines Viertelkreisbogen ist gegeben durch aS = 2<br />
π l.<br />
2l<br />
m2<br />
l<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01
a) Auflager- und Gelenkreaktionen<br />
Freikörperbild:<br />
F<br />
A<br />
Bx = −F , A =<br />
Cx = F , Cy = −<br />
By<br />
Bx<br />
Bx<br />
By<br />
m1 g m2 g<br />
2<br />
π l<br />
m g<br />
π + F , By<br />
2 − π<br />
= m g + F ,<br />
2 π<br />
2 − π<br />
2 π m g + 2m g − F , MC =<br />
b) Schnittgrößenverläufe im Balken B-C<br />
Bereich I: 0 < x < 2l<br />
q0 = mg<br />
,<br />
l<br />
Bx<br />
By<br />
N(x) = −F , Q(x) =<br />
q0<br />
x<br />
2 − π<br />
2π<br />
c) Momentenverlauf im Bogenträger<br />
Bereich <strong>II</strong>: 0 < ϕ < π<br />
2<br />
q1 =<br />
m g<br />
π l ,<br />
M(ϕ) = −Fl sin ϕ +<br />
mg<br />
π<br />
F<br />
2 − 3π<br />
π<br />
Cy<br />
Cx<br />
m g l + 2F l<br />
Q<br />
N<br />
M<br />
MC<br />
<br />
mg<br />
2 − π x2<br />
mg − x + F , M(x) = x − mg + Fx;<br />
l 2π 2l<br />
q1<br />
A<br />
M(ϕ)<br />
l<br />
<br />
+ F [1 − cosϕ] l − mg<br />
πl lϕ<br />
<br />
l sin ϕ<br />
− l cos ϕ .<br />
ϕ<br />
ϕ
2. Aufgabe: (<strong>TM</strong> I-<strong>II</strong>, <strong>TM</strong> I)<br />
01<br />
01<br />
01<br />
01<br />
01<br />
1<br />
z<br />
A<br />
2<br />
F<br />
5a<br />
00000<br />
11111<br />
00000<br />
11111<br />
y<br />
x<br />
10a<br />
6<br />
D<br />
00000 11111<br />
00000 11111 00000 11111<br />
r<br />
.<br />
B<br />
45◦ 3<br />
C<br />
4<br />
00000 11111 00000 11111<br />
5<br />
g<br />
01<br />
01<br />
01<br />
01<br />
01<br />
Ansicht x-y Ebene<br />
3a 3a 3a<br />
y<br />
4a 6a<br />
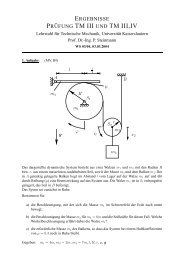
Eine homogene, massebehaftete Scheibe der Masse m mit konstanter Dicke ist wie dargestellt<br />
durch 6 Stäbe in der x-y Ebene gelagert.<br />
Hierbei befinden sich die Stäbe 1-5 in der x-z Ebene, der Stab 6 in der x-y Ebene.<br />
Zusätzlich zur Gewichtskraft greift in der x-y Ebene die Kraft F wie dargestellt an.<br />
Bestimmen Sie<br />
a) den Schwerpunkt der Scheibe im gegebenen x-y-Koordinatensystem,<br />
b) die Stabkräfte in den Stäben 1-6.<br />
Gegeben: F, m, g, a, r = a<br />
√ π<br />
4a<br />
r<br />
9a<br />
x
a) xs = 392a3 9<br />
= 4<br />
80a2 10 a ys = 330a3<br />
= 41<br />
80a2 8 a<br />
b) Stabkräfte<br />
S1 = 19 4<br />
mg −<br />
600 9 F , S2 = 51<br />
100 mg, S3 = 19√2 600 mg, S4 = 11<br />
24 mg, S5 = − 5<br />
S6 = 0<br />
F ,<br />
9
3. Aufgabe: (<strong>TM</strong> I)<br />
A<br />
000000000000000000000000000000000<br />
111111111111111111111111111111111<br />
8l<br />
B<br />
F<br />
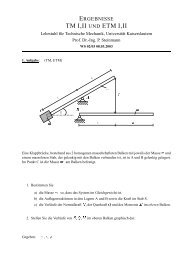
Ein massefreier Träger, der aus zwei Balken und einem Gelenk besteht, ist wie skizziert auf<br />
einer Treppe aufgestellt. Der Träger ist im Gelenk durch die vertikale Kraft F belastet. Das<br />
System befindet sich in Ruhe.<br />
4l<br />
a) Berechnen Sie mit dem Prinzip der virtuellen Verrückungen die horizontale Auflagerkraft<br />
in A. Zeichen Sie dazu den Polplan und die Verschiebungsfigur.<br />
b) Berechnen Sie mit dem Prinzip der virtuellen Verrückungen die vertikale Auflagerkraft<br />
in A. Zeichen Sie dazu den Polplan und die Verschiebungsfigur.<br />
Gegeben: F, l<br />
Anmerkung: Eine Lösung der Aufgabe mit Gleichgewichtsbedingungen wird nicht bewertet.<br />
C<br />
4l<br />
8l
a) Polplan:<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
000<br />
000<br />
111<br />
111<br />
000<br />
111<br />
000<br />
111<br />
0000<br />
1111<br />
π1,2<br />
π1<br />
π2<br />
2<br />
1<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
000000000000000000000000<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
111111111111111111111111<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
.<br />
π1<br />
8l 4l<br />
4l<br />
x1<br />
x1<br />
y1<br />
45 ◦<br />
45 ◦<br />
45 ◦<br />
90 ◦<br />
x1 = √ 2 · 8l, y1 = 16l<br />
Verschiebungsfigur<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
00000000000000000000000<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
11111111111111111111111<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
1<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
0000<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
1111<br />
0000<br />
0000<br />
1111<br />
1111<br />
000<br />
000<br />
111<br />
111<br />
000<br />
111<br />
000<br />
111<br />
0000<br />
0000<br />
1111<br />
1111<br />
0000<br />
1111<br />
0000<br />
1111<br />
0000<br />
1111<br />
Ax<br />
δyF<br />
F<br />
δxA<br />
δϕ<br />
δϕ<br />
x1<br />
y1<br />
Ax = 1<br />
2 F
) Polplan:<br />
000<br />
111<br />
00<br />
00<br />
00<br />
11<br />
11<br />
11<br />
0<br />
0<br />
0<br />
1<br />
1<br />
1<br />
0<br />
0<br />
0<br />
1<br />
1<br />
1<br />
π1,2<br />
π1<br />
π2<br />
2<br />
1<br />
Verschiebungsfigur:<br />
0000<br />
0000<br />
1111<br />
1111<br />
0<br />
0<br />
0<br />
1<br />
1<br />
1<br />
0<br />
0<br />
0<br />
1<br />
1<br />
1<br />
0<br />
0<br />
0<br />
1<br />
1<br />
1<br />
0<br />
0<br />
0<br />
1<br />
1<br />
1<br />
0<br />
0<br />
0<br />
1<br />
1<br />
1<br />
0<br />
0<br />
0<br />
1<br />
1<br />
1<br />
000<br />
111<br />
Ay<br />
δyF<br />
F<br />
δyA<br />
δϕ<br />
δϕ<br />
Ay = 1<br />
2 F
4. Aufgabe: (<strong>TM</strong> <strong>II</strong>, E<strong>TM</strong> I)<br />
l<br />
q0<br />
0000000000000000000000000000000<br />
1111111111111111111111111111111<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
A B<br />
x<br />
EI<br />
EA<br />
l<br />
S<br />
C<br />
l<br />
l<br />
2<br />
D E<br />
Ein Balken AB der Länge l und der Biegesteifigkeit EI ist wie skizziert in A gelenkig gelagert<br />
und durch die konstante Streckenlast q0 belastet. Weiterhin ist der Balken im Punkt B mit einem<br />
Stab S der Länge √ 2l und der Steifigkeit EA verbunden. Der Stab S stützt sich an der Stelle C<br />
auf einen starren Balken ab. Die Lagerung des Balkens CE ist der Abbildung zu entnehmen.<br />
Bestimmen Sie<br />
a) die Auflagerreaktionen in A, D, E und die Stabkraft S,<br />
b) die Schnittgrößen N(x), Q(x) und M(x) im Balken AB als Funktionen der gegebenen<br />
Koordinate x,<br />
c) die Biegelinie w(x) <strong>für</strong> den Balken AB.<br />
Gegeben: q0, EI, EA, l<br />
starr<br />
l
a)<br />
b)<br />
Ax<br />
Ay<br />
q0<br />
0000000000000000000000000000000<br />
1111111111111111111111111111111<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
S = 1<br />
√ 2 q0l, Ay = 1<br />
2 q0l, Ax = 1<br />
2 q0l<br />
Dy = q0l, Ex = 1<br />
2 q0l, Ey = − 1<br />
2 q0l<br />
Ax<br />
Ay<br />
q0<br />
0000000000000000000000000000000<br />
1111111111111111111111111111111<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
01<br />
S<br />
S<br />
ξ Q(x)<br />
x<br />
Dy<br />
M(x)<br />
N(x)<br />
Bereich 0 < x < l: N(x) = − 1<br />
2 q0l,<br />
<br />
1<br />
Q(x) = q0 l − x ,<br />
2<br />
M(x) = 1<br />
2 q0 x [l − x]<br />
c) w(x) = − 1<br />
<br />
1<br />
EI 12 q0 l x 3 + 1<br />
24 q0 x 4 + 1<br />
24 q0<br />
<br />
l x + 1 √<br />
2q0 l<br />
EI<br />
Ey<br />
Ex
5. Aufgabe: ( <strong>TM</strong> <strong>II</strong>)<br />
EA<br />
a a a<br />
1<br />
A<br />
EI<br />
2<br />
starr<br />
EI<br />
Ein dehnstarrer Rahmen (Biegesteifigkeit EI) ist wie skizziert gelagert und wird durch eine<br />
Kraft F belastet. Der Stab 1 besitzt die Dehnsteifigkeit EA, während der Stab 2 als starr angesehen<br />
werden kann.<br />
Ermitteln Sie<br />
a) die Lagerreaktionen im Punkt A und die Stabkraft S1 des Stabes 1,<br />
b) die Horizontalverschiebung uB des Punktes B,<br />
c) die Stabkraft S2 des Stabes 2,<br />
d) die Vertikalverschiebung vB des Punktes B. Skizzieren Sie hierzu den Momentenverlauf<br />
im Rahmen und geben Sie ausgezeichnete Werte an.<br />
Gegeben: F, EA, EI, a<br />
F<br />
B<br />
a<br />
a
a) Freikörperbild<br />
S1<br />
AH<br />
AV<br />
S1 = F , AH = F , AV = F<br />
b) uB = Fa<br />
EA<br />
c) S2 = − 5√2 2 F<br />
2 7a 1<br />
d) vB = + Fa<br />
6EI EA<br />
F
6. Aufgabe: (<strong>TM</strong> <strong>II</strong>, E<strong>TM</strong> I)<br />
y<br />
x<br />
2<br />
E2, ν<br />
1<br />
E1, ν<br />
δ<br />
2h<br />
p h<br />
Die beiden homogenen, elastischen Scheiben (Elastizitätsmoduln E1 bzw. E2, Querkontraktionszahl<br />
ν > 0) sind wie skizziert in eine starre Einfassung eingepasst. Die Scheibe 1 wird durch<br />
einen Druck p belastet. Die Scheibenränder können reibunfsfrei gleiten. In beiden Scheiben liegen<br />
ebene Spannungszustände vor. Zwischen der Scheibe 2 und der oberen Wand besteht ein<br />
Spalt der Breite δ (δ ≪ h).<br />
a) Ermitteln Sie den Druck p = p ∗ , <strong>für</strong> den die Scheibe 2 den Spalt gerade ausfüllt.<br />
b) Berechnen Sie <strong>für</strong> p = 2p ∗ den Spannungszustand in den beiden Scheiben.<br />
Gegeben: E1, E2, ν, h, δ
a) p∗ = E1 δ<br />
ν h<br />
b)<br />
σ (1)<br />
x<br />
E1<br />
= −2δ<br />
h ν<br />
σ (1)<br />
y = − δ<br />
h<br />
τ (1)<br />
xy = 0<br />
σ (1)<br />
x<br />
= −δ<br />
h<br />
σ (2)<br />
y = − δ<br />
h<br />
τ (2)<br />
xy = 0<br />
1<br />
1 + 21−ν2<br />
E1 E2<br />
1<br />
E1<br />
ν<br />
+ 21−ν2<br />
E2<br />
1<br />
1 + 21−ν2<br />
E1 E2
7. Aufgabe: (E<strong>TM</strong> <strong>II</strong> )<br />
ϕ<br />
000 111<br />
000 111<br />
m<br />
000 111<br />
00000000000000000000000000<br />
11111111111111111111111111<br />
000 111<br />
00000000000000000000000000<br />
11111111111111111111111111<br />
r<br />
00000000000000000000000000<br />
11111111111111111111111111<br />
00000000000000000000000000<br />
11111111111111111111111111<br />
00000000000000000000000000<br />
11111111111111111111111111<br />
00000000000000000000000000<br />
11111111111111111111111111<br />
M<br />
00000000000000000000000000<br />
11111111111111111111111111<br />
00000000000000000000000000<br />
11111111111111111111111111 x<br />
00000000000000000000000000<br />
11111111111111111111111111<br />
00000000000000000000000000<br />
11111111111111111111111111<br />
00000000000000000000000000<br />
11111111111111111111111111 µ<br />
00000000000000000000000000<br />
11111111111111111111111111<br />
00000000000000000000000000<br />
11111111111111111111111111<br />
00000000000000000000000000<br />
11111111111111111111111111<br />
α<br />
00000000000000000000000000<br />
11111111111111111111111111<br />
Ein Brett (Masse M) rutscht auf einer schiefen Ebene mit dem Reibkoeffizienten µ hinab. Auf<br />
dem Brett rollt eine Walze ( Radius r, Masse m) ohne zu gleiten. Die Walze wird durch ein<br />
parallel zur schiefen Ebene gespanntes Seil gehalten. Zu Beginn ist das System in Ruhe.<br />
Bestimmen Sie:<br />
a) die Freikörperbilder <strong>für</strong> die Walze und das Brett,<br />
b) die Beschleunigung ¨x der Brettes,<br />
c) den Reibkoeffizienten, damit das System in Ruhe bleibt,<br />
d) die Arbeit, welche bei einer Verschiebung des Brettes um die Strecke s am System geleistet<br />
wird,<br />
e) die Geschwindigkeit des Brettes nach der Verschiebung um die Strecke s.<br />
Gegeben: m; r; M; µ; α; s.<br />
g
a) die Freikörperbilder<br />
ϕ<br />
b) ¨x =<br />
α<br />
O<br />
mg<br />
R2<br />
N2<br />
R1<br />
S<br />
N2<br />
R2<br />
Mg<br />
N1<br />
M · sin α − (M + m) µ cosα<br />
M + m g<br />
2<br />
c) µ ≥ M<br />
· tan α<br />
M + m<br />
d) Wges | 2 1 = [M sin α − µ (M + m) cosα]gs<br />
<br />
4 [M sin α − µ (M + m)cos α]gs<br />
e) ˙x =<br />
m + 2M<br />
x
8. Aufgabe: (E<strong>TM</strong> <strong>II</strong>)<br />
Planetenradträger<br />
Planetenrad<br />
(Radius r)<br />
Sonnenrad<br />
(Radius R)<br />
B<br />
y<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
C<br />
A<br />
ω1<br />
00000 11111<br />
Bei einem Planetengetriebe dreht sich das Planetenrad (Radius r, Winkelgeschwindigkeit ω2)<br />
um das Sonnenrad (Radius R, Winkelgeschwindigkeit ω1). Der Planetenradträger dreht sich mit<br />
der Winkelgeschwindigkeit ω3.<br />
Bestimmen Sie <strong>für</strong> die skizzierte Lage:<br />
a) den Geschwindigkeitsvektor in B,<br />
b) den Geschwindigkeitsvektor in C (Kontaktpunkt zwischen Sonnen- und Planetenrad),<br />
c) die Winkelgeschwindigkeit ω2,<br />
Für den Sonderfall ω1 = −ω3 :<br />
d) den Ortsvektor zum Momentanpol des Planetenrades,<br />
e) den Geschwindigkeitsvektor in D.<br />
Gegeben: ω1; ω3; r; R.<br />
ω3<br />
ω2<br />
D<br />
x
a) vB = − (R + r) ω3 ex<br />
b) vC = −R ω1 ex<br />
c) ω2 = 1<br />
r [(R + r) ω3 − Rω1]<br />
Sonderfall: ω1 = −ω3:<br />
2R + r<br />
ω2 = ω3<br />
r<br />
⎡<br />
⎤<br />
0<br />
d) rMP = ⎣ 2R ⎦<br />
(R + r)<br />
2R + r<br />
e) vD = − (R + r)ω3 ex + (2R + r) ω3 ey
9. Aufgabe: (E<strong>TM</strong> <strong>II</strong>)<br />
m<br />
v0 S<br />
0000 1111<br />
0000 1111<br />
0000 1111 r<br />
0000 1111<br />
000000000000000000000000000000000000000000000000000000000<br />
111111111111111111111111111111111111111111111111111111111<br />
0000 1111<br />
000000000000000000000000000000000000000000000000000000000<br />
111111111111111111111111111111111111111111111111111111111<br />
000000000000000000000000000000000000000000000000000000000<br />
111111111111111111111111111111111111111111111111111111111<br />
µ0<br />
Ein Wagen (Masse m) stößt zentrisch mit der Geschwindigkeit v0 gegen eine ruhende Kugel<br />
(Masse M, Radius r). Die Stoßzahl e beträgt 0,5. Zwischen der Walze und der Unterlage wirkt<br />
der Reibkoeffizient µ0. Für x > ˆs rollt die Kugel ohne zu gleiten.<br />
Ermitteln Sie<br />
a) die Geschwindigkeit des Wagens unmittelbar nach dem Stoß,<br />
b) die Schwerpunktsgeschwindigkeit der Kugel unmittelbar nach dem Stoß,<br />
c) die Schwerpunktsbeschleunigung ¨x und die Winkelbeschleunigung ¨ϕ der Kugel <strong>für</strong><br />
0 < x < ˆs,<br />
d) die Zeit ˆt und die Strecke ˆs bei der Rollbedingung erstmalig erfüllt wird,<br />
e) die Geschwindigkeit der Kugel <strong>für</strong> x > ˆs.<br />
Gegeben: v0; e = 0, 5; µ0; M; m = M ; r. 2<br />
Anmerkung: Die Reibkraft kann beim Stoßvorgang vernachlässigt werden.<br />
ϕ<br />
M<br />
x<br />
ˆs
m − eM<br />
a) ¯v1 =<br />
M + m v0 ⇒ mit M = 2m ¯v1 = 0<br />
b) ¯v2 = 1<br />
2 v0<br />
c) ¨x = −µg , ¨ϕ = 2 g<br />
µ<br />
5 r<br />
d) ˆt = v0<br />
7µ g , x ˆt = 3<br />
49<br />
e) v ˆt = 5<br />
14 v0<br />
v 2 0<br />
µ g<br />
= ˆs