PR ¨UFUNG TM III UND TM III,IV - Lehrstuhl für Technische Mechanik
PR ¨UFUNG TM III UND TM III,IV - Lehrstuhl für Technische Mechanik
PR ¨UFUNG TM III UND TM III,IV - Lehrstuhl für Technische Mechanik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
1. Aufgabe: (MV, BI)<br />
x3<br />
ϕ3<br />
g<br />
ERGEBNISSE<br />
<strong>PR</strong>ÜFUNG <strong>TM</strong> <strong>III</strong> <strong>UND</strong> <strong>TM</strong> <strong>III</strong>,<strong>IV</strong><br />
<strong>Lehrstuhl</strong> <strong>für</strong> <strong>Technische</strong> <strong>Mechanik</strong>, TU Kaiserslautern<br />
2R<br />
R<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111 µ3<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111 α<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
0000000000000000000<br />
1111111111111111111<br />
Prof. Dr.-Ing. P. Steinmann<br />
K3<br />
SS 2007, 20.08.2007<br />
ϕ2<br />
R<br />
K2<br />
x1 = x<br />
m1<br />
0000000000000000000000000000000000000000000000<br />
1111111111111111111111111111111111111111111111<br />
0000000000000000000000<br />
1111111111111111111111<br />
0000000000000000000000<br />
1111111111111111111111<br />
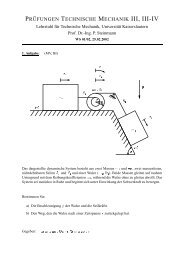
Das dargestellte System besteht aus einer Masse m1 und den zwei massegleichen Walzen K2<br />
und K3 die mit einem undehnbarem Seil miteinander verbunden sind. Das Seil liegt schlupffrei<br />
auf der homogenen Walze K2 auf und ist um den inneren Radius der Walze K3 gewickelt. Die<br />
Masse m1 gleitet mit dem Reibungkoeffizienten µ1. Zwischen der Walze K3 und der schiefen<br />
Ebene wirkt der Reibungskoeffizienten µ3. Das System sei zunächst in Ruhe und beginne sich<br />
unter Einwirkung der Schwerkraft zu bewegen. Dabei wird angenommen, dass die Walze K3<br />
rollt ohne zu gleiten.<br />
a) Bestimmen Sie die kinematischen Zusammenhänge der Koordinaten mit x, d.h. x1(x),<br />
x3(x), ϕ2(x) und ϕ3(x).<br />
b) Stellen Sie die dynamischen Grundgleichungen <strong>für</strong> jedes Teilsystem auf.<br />
c) Bestimmen Sie die Bewegungsgleichung des Gesamtsystems ¨x.<br />
d) Berechnen Sie, wie groß der Haftkoeffizient µ3 mindestens sein muss, damit die Annahme<br />
der Rollbedingung zutrifft.<br />
Gegeben: m, R, µ1, α<br />
m1 = m , m2 = m3 = 5<br />
6 m Θ3 = 1<br />
2 mR2 .<br />
µ1
a) 1. x1 = x<br />
2. ϕ2 = x<br />
R<br />
3. x3 = 2<br />
3 x<br />
4. ϕ3 = x<br />
3R<br />
b) 1. S1 = µ1mg + m¨x<br />
2. S1R − S2R + ¨xΘ2<br />
R<br />
3. S2 + FH − 5<br />
6<br />
= 0<br />
5¨x<br />
mg sin α + m = 0<br />
9<br />
4. ¨xmR<br />
6 + S2R − 2FHR = 0<br />
c) ¨x = 108<br />
199 g<br />
<br />
5<br />
sin α − µ1<br />
9<br />
d) µ3 ≥<br />
201<br />
199 sin α + 1176<br />
995 µ1<br />
cosα
2. Aufgabe: (MV, BI)<br />
a<br />
a<br />
2a<br />
a<br />
D<br />
➁<br />
B<br />
➀<br />
A<br />
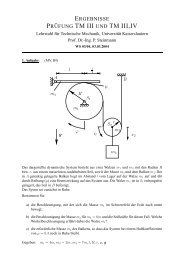
Das dargestellte ebene System besteht aus 2 vertikalen, starren Balken (1, 2), einem horizontalen<br />
starren Balken (3) sowie einer Translationsfeder und zwei Drehfedern mit gegebenen Federsteifigkeiten.<br />
Die Balken 1 und 2 sind durch ein Gelenk und eine Drehfeder miteinander<br />
verbunden. Der horizontale Balken 3 ist in Punkt D starr an Balken 2 angeschlossen. Das System<br />
wird durch die stets vertikale konstante Streckenlast q belastet. Alle Balken sind starr und<br />
masselos.<br />
C<br />
a) Skizzieren Sie das infinitesimal ausgelenkte System unter Angabe der kinematischen<br />
Größen.<br />
b) Stellen Sie die charakteristische Gleichung auf, aus der die kritische Last berechnet werden<br />
kann.<br />
c) Bestimmen Sie die kritische Streckenlast qkrit.<br />
d) Skizzieren Sie die dazugehörige Eigenform unter Angabe der Knotenverschiebungen.<br />
Gegeben: a , cF , cMA = cMB = a 2 cF<br />
cF<br />
a<br />
➂<br />
cMB<br />
cMA<br />
q
zu (a)<br />
D<br />
➁<br />
B<br />
➀<br />
A<br />
C<br />
➂<br />
ψ1<br />
ψ2<br />
R<br />
ψ2 − ψ1<br />
zu (d)<br />
Abbildung 1: zu (a) Kinematik, zu (d) Eigenmodus der 1. Knicklast<br />
a) Kinematik (siehe Abb. 1)<br />
horizontale Verschiebung in Abhängigkeit von Stabdrehwinkeln ψk:<br />
uA = 0 uB = 2aψ1 uC = 2aψ1 + aψ2 uD = 2aψ1 + 2aψ2<br />
Knotendrehwinkel<br />
ϕA = ψ1<br />
b) q 2 − 2cFq + 11<br />
ϕB = ψ2 − ψ1<br />
16 c2 F<br />
.<br />
= 0<br />
√ <br />
5<br />
c) qkrit = 1 − cF = 0.44098cF<br />
4<br />
d) Eigenform (siehe Abb. 1)<br />
ψ1 = 2 − √ 5 ψ2 = −0.2360ψ2<br />
Knotenverschiebungen mit ψ 2 = 1<br />
uA = 0 uB = 2[2 − √ 5]a = −0.4721a<br />
uC = [5 − 2 √ 5]a = 0.5279a uD = [6 − 2 √ 5]a = 1.5279a<br />
➂<br />
D<br />
➀<br />
A<br />
ψ2<br />
B<br />
ψ1<br />
➁<br />
R<br />
ψ2
3. Aufgabe: (MV, BI)<br />
00000000000000000000000<br />
11111111111111111111111<br />
00000000000000000000000<br />
11111111111111111111111<br />
00000000000000000000000<br />
11111111111111111111111<br />
1<br />
ϕ<br />
2 3<br />
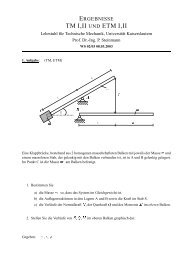
Drei Kugeln hängen so, dass ihre Mittelpunkte auf einer Geraden liegen und sie sich gegenseitig<br />
fast berühren. Die Kugeln befinden sich anfangs in Ruhe, Kugel 1 ist um den Winkel ϕ aus ihrer<br />
Ruhelage ausgelenkt.<br />
Bestimmen Sie unter Annahme voll elastischer Stöße (e = 1)<br />
a) die Geschwindigkeit v1 der Masse m1 unmittelbar vor dem Stoß.<br />
b) die Massenverhältnisse m2<br />
m1<br />
und m3<br />
m1<br />
derart, dass unmittelbar nach dem Stoß die Masse<br />
m2 ruht und die Geschwindigkeiten der Massen m1 und m3 nach dem Stoß betragsmäßig<br />
gleich sind, also |˜v1| = |˜v3|. Bestimmen Sie hierzu jeweils Impulse und Energien der<br />
Kugeln vor und nach dem Stoß.<br />
<br />
˜v1<br />
<br />
c) das Verhältnis <br />
<strong>für</strong> die unter b) berechneten Massenverhältnisse.<br />
v1<br />
d) den maximalen Auslenkwinkel ψ der Masse m3 nach dem Stoß in Abhängigkeit von ϕ<br />
<strong>für</strong> diese Massenverhältnisse.<br />
Gegeben: g = |g|, l, ϕ, v2 = v3 = 0, ˜v2 = 0, |˜v1| = |˜v3|, e = 1.<br />
a) v1 = 2gl [1 − cos ϕ].<br />
b) m2<br />
m1<br />
c)<br />
<br />
˜v1<br />
<br />
<br />
<br />
v1<br />
= m3<br />
m1<br />
= 1<br />
2 .<br />
d) ψ = arccos<br />
= 3.<br />
<br />
3 1<br />
+ cos ϕ .<br />
4 4<br />
l<br />
g
4. Aufgabe: (MV)<br />
d<br />
A<br />
m1<br />
l<br />
Gegeben ist das dargestellte System bestehend aus einem starren Balken (Masse m1, Länge<br />
l), welcher sich an der Wand über einen Dämpfer (Dämpfungskonstante d) abstützt, und einer<br />
Walze (Masse m2, Radius R), die ohne zu gleiten auf der Unterlage abrollt. Die Walze und<br />
der Balken sind unter Verwendung einer Drehfeder (Federsteifigkeit cM) gelenkig miteinander<br />
verbunden. Die Drehfeder ist in der Ausgangslage ϕ = 0 entspannt.<br />
a) Zeichnen Sie alle relevanten Schnittbilder und stellen Sie die dynamischen Gleichgewichtsbedingungen<br />
auf.<br />
b) Bestimmen Sie die resultierende Schwingungsdifferentialgleichung <strong>für</strong> die Translation<br />
des Balkens unter Verwendung der Koordinate x.<br />
c) Ermitteln Sie hieraus den Dämpfungsgrad D, sowie die Eigenkreisfrequenz ωd der gedämpften<br />
Schwingung.<br />
d) Lösen Sie die Differentialgleichung <strong>für</strong> den schwach gedämpften Fall unter Verwendung<br />
der gegebenen Anfangsbedingungen x(t = 0) = 0 und ˙x(t = 0) = v0.<br />
Gegeben: m1 = m, m2 = 2m, d, cM, R, l, v0, g<br />
R<br />
ϕ<br />
m2<br />
cM<br />
x<br />
g
a)<br />
Fd<br />
A<br />
System 1:<br />
m1¨x<br />
A + Cy − m1 g = 0<br />
m1 ¨x + Fd − Cx = 0<br />
McM + A l − m1 g l<br />
= 0<br />
2<br />
b) ¨x + d<br />
4 m<br />
cM<br />
˙x + x = 0<br />
4 m R2 c) Dämpfungsgrad D =<br />
x<br />
m1g<br />
d 2 R 2<br />
16 m cM<br />
Kreisfrequenz der gedämpften Schwingung<br />
ωd =<br />
d) x(t) = v0<br />
16 cM m − d 2 R 2<br />
ωd<br />
64 m 2 R 2<br />
e −δt <br />
cos ωd t − π<br />
<br />
2<br />
McM<br />
Cy<br />
Cx<br />
m2¨x<br />
System 2:<br />
Θs ¨ϕ<br />
H<br />
Cx<br />
Cy<br />
ϕ<br />
m2g<br />
N<br />
McM<br />
N − Cy − m2 g = 0<br />
H − Cx − m2 ¨x = 0<br />
ΘB ¨ϕ + McM + Cx R = 0
5. Aufgabe: (MV)<br />
R<br />
m<br />
cM<br />
cF<br />
Das dargestellte System besteht aus einer homogenen Kreisscheibe (Masse M, Radius R) und<br />
einer Punktmasse m. In die Kreisscheibe ist eine radial verlaufende Nut eingearbeitet in der<br />
die Punktmasse reibungsfrei linear geführt wird. Die Scheibe ist im Schwerpunkt drehbar gelagert<br />
und über eine lineare Drehfeder (Federkonstante cM) mit dem Auflager verbunden. Die<br />
Punktmasse ist über eine lineare Feder (Federkonstante cF , Länge l im entspannten Zustand)<br />
mit dem Auflager der Scheibe verbunden. Für ϕ = 0 und s = 0 sind die Drehfeder bzw. die<br />
Feder entspannt.<br />
Bestimmen Sie unter Verwendung der generalisierten Koordinaten ϕ und s:<br />
a) die kinetische Energie T = T(ϕ, s, ˙ϕ, ˙s) des Gesamtsystems;<br />
b) die potentielle Energie Π = Π(ϕ, s) des Gesamtsystems:<br />
c) die Bewegungsgleichungen <strong>für</strong> große Auslenkungen mit den LAGRANGEschen Gleichungen<br />
2. Art;<br />
d) die Eigenkreisfrequenz ω0 der Scheibe <strong>für</strong> kleine Schwingungen um die Ruhelage ϕ = 0<br />
<strong>für</strong> den Fall, dass die Punktmasse m an der Stelle s = 0 fest mit der Scheibe verbunden<br />
ist.<br />
Gegeben: M, m, R, l, cF , cM, g.<br />
Anmerkung: Bei der Berechnung des Trägheitsmoments der Scheibe ist die Geometrie der Nut<br />
zu vernachlässigen.<br />
ϕ<br />
M<br />
l<br />
s<br />
g
a) T = Tm + <strong>TM</strong> = 1<br />
2 m(˙s2 + (l + s) 2 ˙ϕ 2 ) + 1<br />
2 ΘS M ˙ϕ 2<br />
b) Π = ΠcM + ΠcF + ΠGm = 1<br />
2 cM ϕ 2 + 1<br />
2 cF s 2 − mg(l + s) cosϕ<br />
c) m(l + s) 2 ¨ϕ + Θ S M ¨ϕ + 2m(l + s)˙s ˙ϕ + cM ϕ + mg(l + s) sinϕ = 0<br />
m¨s + cF s − m(l + s) ˙ϕ 2 − mg cosϕ = 0<br />
d) <strong>für</strong> cF = ∞<br />
<br />
cM + mgl<br />
ω0 =<br />
ml 2 + Θ S M