PR ¨UFUNGEN TECHNISCHE MECHANIK III, III-IV - Lehrstuhl für ...
PR ¨UFUNGEN TECHNISCHE MECHANIK III, III-IV - Lehrstuhl für ...
PR ¨UFUNGEN TECHNISCHE MECHANIK III, III-IV - Lehrstuhl für ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Sfrag replacements<br />
<strong>PR</strong>ÜFUNGEN <strong>TECHNISCHE</strong> <strong>MECHANIK</strong> <strong>III</strong>, <strong>III</strong>-<strong>IV</strong><br />
<strong>Lehrstuhl</strong> <strong>für</strong> Technische Mechanik, Universität Kaiserslautern<br />
1. Aufgabe: (MV, BI)<br />
£¡<br />
¤¦¥<br />
§¢¥<br />
Prof. Dr.-Ing. P. Steinmann<br />
WS 01/02, 25.02.2002<br />
¨ ©<br />
¤©©<br />
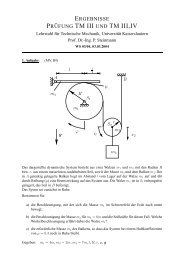
Das dargestellte dynamische System besteht aus zwei Massen ¤¥ und ¤ , zwei massenlosen,<br />
nichtdehnbaren Seilen ¨ ¥ und ¨ © und einer Walze ( ¤©© ). Beide Massen gleiten auf rauhem<br />
Untergrund mit dem Reibungskoeffizienten ¡ , während die Walze ohne zu gleiten abrollt. Das<br />
System sei zunächst in Ruhe und beginnt sich unter Einwirkung der Schwerkraft zu bewegen.<br />
Bestimmen Sie:<br />
<br />
§©<br />
<br />
a) Die Beschleunigung <br />
der Walze und die Seilkräfte.<br />
b) Den Weg, den die Walze nach einer Zeitspanne zurückgelegt hat.<br />
Gegeben: ¤¥¤©©<br />
<br />
¤ £¡<br />
¨ ¥<br />
<br />
¤<br />
¢¡<br />
<br />
§
¡<br />
a)<br />
¢<br />
<br />
¢¤¦¥£ <br />
¤¤£¦¥¨§© ¥<br />
<br />
© <br />
¤¦¥ ¤© © ¤<br />
©£<br />
¨ ¥ ¤ £¦¥¨§© ¥ ¢<br />
<br />
¤¦¥£ © ¨<br />
b) §© ¢<br />
<br />
<br />
¢¤¦¥ <br />
<br />
©<br />
<br />
<br />
<br />
¤<br />
<br />
<br />
©
2. Aufgabe: (MV, BI)<br />
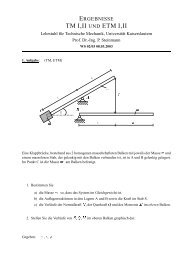
m 1 ,Θ 1<br />
μ G<br />
Das dargestellte dynamische System besteht aus einer Masse £ ¤¥ ¥ und einer homogenen<br />
<br />
¢ ¡<br />
Walze , die über einen masselosen Balken der Länge miteinander verbunden sind. Das<br />
£ ¤©<br />
System befindet sich zunächst in Ruhe und bewegt sich nach dem Loslassen eine schiefe Ebene<br />
(Neigungswinkel ) hinab. Die Walze rollt ohne zu gleiten.<br />
Bestimmen Sie:<br />
a) Die Geschwindigkeit ¢ © des Systems nach der Strecke §© , wenn bei der Masse ¤¥ keine<br />
Reibung berücksichtigt wird.<br />
b) Die ¢¤£ © Geschwindigkeit des Systems nach der § £© Strecke , wenn <strong>für</strong> die ¤¥ Masse Gleitreibung<br />
angenommen wird.<br />
c) Die ¥§¦ Winkelgeschwindigkeit des Gesamtsystems, wenn die Rolle nach der Strecke § © ¦<br />
schlagartig starr (drehfest) mit dem Balken verbunden wird. Die Gleitreibung der Masse<br />
ist zu berücksichtigen. Zwischen der Rolle und der Unterlage soll keine Relativbewe-<br />
¤¦¥<br />
gung auftreten.<br />
Gegeben: ¤¦¥ ¤© ¤ ¥ £¡ ¡ ©¨ <br />
a) ¢ ©<br />
<br />
<br />
<br />
<br />
¢ £ ¤© ¤¦¥¨ ¥ § © §©<br />
<br />
¤¦¥ ¤© <br />
© <br />
©<br />
¨<br />
mit ©<br />
2l<br />
a<br />
©<br />
¤©¨<br />
¢<br />
x<br />
m 2<br />
α
¢ £ ¡ b)<br />
c) ¥ ¦<br />
<br />
<br />
<br />
<br />
¢ <br />
¥ ¦ ¡ §¦<br />
¨ mit<br />
¢<br />
<br />
¢ £ ¤¦¥ ¤© ¥¨§© ¤¦¥ £¡ ¥ ¥¤£ § £© £<br />
¥<br />
¥ ¥<br />
¢ ¤ ¨<br />
©<br />
<br />
<br />
<br />
<br />
<br />
¢ <br />
¨<br />
©<br />
<br />
¥ ¦<br />
¡<br />
¤¦¥ ¤©<br />
¤ ¡ ©<br />
<br />
©<br />
© <br />
¨<br />
£ ¤¦¥ ¤© ¥¨§© ¤¦¥ £¡ ¥ ¥¨£ § ¢ © £ ¦<br />
,<br />
<br />
¤¦¥ ¤©<br />
©<br />
©<br />
¨<br />
¥ ¦ ¡ wo – Winkelgeschwindigkeit vor der Blockierung
3. Aufgabe: (MV, BI)<br />
PSfrag replacements<br />
<br />
¡<br />
¢<br />
<br />
Ein starrer, rotationssymmetrischer Körper (Gewichtskraft £ ) bestehe aus einer homogenen<br />
Halbkugel (Radius ) und einem aufgesetzten Kegel (Höhe ) des gleichen Materials.<br />
a) Bestimmen Sie die Lage des Schwerpunktes des Körpers in Bezug auf den eingezeichneten<br />
Koordinatenursprung ¢<br />
.<br />
b) Zeigen Sie mit Hilfe des Gesamtpotentials, dass die dargestellte Lage ( ¡ ¥¤ ) ein Gleichgewichtszustand<br />
ist, der nicht vom Verhältnis Radius zur Höhe abhängt.<br />
c) Wie groß ist die Höhe zu wählen, damit die dargestellte Gleichgewichtslage ( ¦¤ )<br />
indifferent ist?<br />
d) Wie verhält sich der Körper, nachdem er aus einer infinitesimal ausgelenkten Lage<br />
) seiner freien Bewegung überlassen wird<br />
©¤<br />
(¦¨§<br />
<br />
<br />
(i) <strong>für</strong> (ii) <strong>für</strong> © <br />
(iii) <strong>für</strong><br />
wobei der in Aufgabenteil c) ermittelten Höhe entspricht.<br />
Gegeben: , £<br />
Hinweis: Bezüglich des Koordinatenursprungs ¢<br />
liegt der Teilschwerpunkt der Halbkugel bei<br />
<br />
<br />
und der des Kegels bei ¡<br />
¥<br />
. Das Volumen einer Kugel entspricht ¡ <br />
und <br />
das eines Kegels ergibt sich aus dem Produkt von ¥<br />
mit seiner Grundfläche.<br />
<br />
a) ¡ <br />
©<br />
<br />
<br />
©<br />
b) £ ¡ ¥¨§© ¤ ¡ <strong>für</strong> ¡ ¤
c) ¡ <br />
d) (i) <strong>für</strong><br />
<br />
pendelt in die<br />
¡ ¤<br />
Gleichgewichtslage<br />
(ii) <strong>für</strong> <br />
verharrt im ausgelenkten Zustand<br />
(iii) © <br />
<strong>für</strong><br />
kippt um<br />
wobei der in Aufgabenteil c) ermittelten Höhe entspricht.
4. Aufgabe: (MV, BI)<br />
PSfrag replacements<br />
¤¦¥<br />
¢ ¥¡<br />
£<br />
¥ ¤¥¤<br />
Ein Massepunkt ¤¥ trifft mit ¢ ¥¡ einer Geschwindigkeit unter ¤ ¤ einem Winkel<br />
£<br />
im <br />
Punkt<br />
auf die starre Kreisscheibe (Radius , Masse ¤ © , Schwerpunkt ¨ ), die eine glatte Oberfläche<br />
besitzt. Die Kreisscheibe befindet sich vor dem Stoss in Ruhe. Der Stoss erfolgt rein elastisch.<br />
Bestimmen Sie:<br />
¦ ¢ ¥¡§ ¦<br />
¤¥ ©¨§ ¢ a) Den Geschwindigkeitsvektor des Massenpunktes , den Geschwindigkeitsvektor<br />
der Kreisscheibe im Punkt £ ©¨§ ¥ und deren Winkelgeschwindigkeit kurz nach dem Stoss.<br />
b) Die Stosskräfte im Punkt £ und im Auflager ¢<br />
Gegeben: ¤¥¤ ¤¦¥¤© <br />
<br />
¢ ¥¡<br />
Hinweis: Der Einfluß der Schwerkraft ist zu vernachlässigen.<br />
a) ¢ ¥¡§© ¤<br />
¢ ¥¡§ <br />
¢ ©¨§ <br />
¥ ©¨§<br />
¢ ©¨§©<br />
¢ ¤© ¤¦¥<br />
¢ ¤© ¢ ¥¡ <br />
¤¦¥<br />
¤¦¥ ¢<br />
¢ ¤© ¢ ¥¡ <br />
¤¦¥<br />
¤¦¥ <br />
¤¦¥ ¢ ¤© <br />
£<br />
¢ ¥¡ <br />
¤¦¥ ¢<br />
£ ¤¦¥ ¢ ¤© ¢ ¥¡ <br />
<br />
¨<br />
¤©<br />
.<br />
<br />
¢
)<br />
¡<br />
¢ <br />
¢ ©<br />
¤¦¥ ¤© <br />
¢ ¤© ¢ ¥¡ <br />
¤¦¥<br />
¤¦¥ ¤© ¢<br />
¢ ¤© ¢ ¥¡ <br />
¤¦¥<br />
¤¦¥ ¤© ¢<br />
£ ¤¦¥ ¢ ¤© ¢ ¥¡
5. Aufgabe: (MV, BI)<br />
PSfrag replacements<br />
<br />
¡£¢<br />
¢<br />
§<br />
¥ ¥¤<br />
An einem masselosen Rahmen, der im Punkt ¢ drehbar gelagert ist, befindet sich am freien Ende<br />
eine Punktmasse ¤ . Im Auflager ¢ wirkt ein konstantes Reibmoment ¡¨¢<br />
. Zum Zeitpunkt<br />
¥ ¦¤ beträgt die Auslenkung des Rahmens aus der horizontalen Lage ¡ und die Winkelge-<br />
schwindigkeit ¥ ¡ ¥¤ .<br />
Bestimmen Sie:<br />
a) die <br />
Winkelbeschleunigung<br />
nen in Abhängigkeit der Auslenkung ;<br />
b) im Schenkel £<br />
tes ¡ § <br />
als Funktionen der Auslenkung <br />
£<br />
Gegeben: ¡ , ¤ ,<br />
a)<br />
¢ © <br />
©<br />
¦<br />
<br />
¢ ¡<br />
¢ ¤ <br />
¢<br />
¦<br />
2<br />
, die Winkelgeschwindigkeit ©<br />
¡<br />
¤<br />
1<br />
¦<br />
<br />
, sowie die Auflagerreaktio-<br />
den Verlauf der Normalkraft £ § , der Querkraft £ § und des Momen-<br />
¡<br />
,<br />
¡¢<br />
¥ <br />
<br />
¢<br />
¥¨§© <br />
¡<br />
¡¢<br />
¢ ¡<br />
b) £ § <br />
£ § <br />
¡<br />
£ § ¡¢<br />
¥¨§© <br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
¤<br />
¥ § © <br />
¢<br />
¤<br />
¥¨§© <br />
¢<br />
<br />
<br />
¡¢<br />
¤ ¡ © ¢<br />
¥ § © ¡ <br />
¢ ¥¨§© ¡ <br />
<br />
<br />
<br />
<br />
¡ ¦ ¢ <br />
<br />
<br />
<br />
<br />
¢ ¥¨§ © ¡ <br />
¢ ¥ § © ¡ <br />
¤ ¡<br />
<br />
¡¢<br />
¤ ¡ © £ ¡ <br />
¢<br />
<br />
¢ ¡£¢<br />
¡<br />
<br />
<br />
<br />
<br />
<br />
¥¨§ © <br />
¢<br />
<br />
<br />
¡¢<br />
¡<br />
<br />
<br />
¡£¢<br />
¡<br />
£ ¡ <br />
<br />
<br />
¡ ¦ ¢ <br />
¡ ¦ ¢ <br />
¢ ¥¨§© ¡ <br />
<br />
<br />
<br />
¦<br />
<br />
§<br />
<br />
¡
6. Aufgabe: (MV)<br />
PSfrag replacements<br />
<br />
¢ ¥<br />
¤¦¥<br />
Ein schwingungsfähiges System besteht aus einem homogenen Stab (Länge ¡<br />
, Masse ¤ ¥ ) und<br />
einem masselosen Stab der Länge ¡ , am freien Ende dessen eine Punktmasse ¤© befestigt ist.<br />
Beide Stäbe können sich um ihre Achsen ¢ ¢ © und reibungslos drehen. Die freien ¥ Enden<br />
von beiden Stäben sind durch eine Feder der Steifigkeit ¡ miteinander gekoppelt. Der Abstand<br />
zwischen den beiden Achsen entspricht der Länge der entspannten Feder. Das statische Gleichgewicht<br />
wird durch die Auslenkung eines Pendels gestört.<br />
Bestimmen Sie:<br />
a) Die potentielle Energie des Systems.<br />
b) Die kinetische Energie des Systems.<br />
c) Die Lagrangesche Funktion des Systems.<br />
d) Die Bewegungsgleichungen des Systems.<br />
e) Die linearisierten Bewegungsgleichungen des Systems.<br />
f) Die charakteristische Gleichung zur Bestimmung der Eigenfrequenzen des Systems.<br />
Gegeben:<br />
¡ , ¤¥ ¢ ¤ , ¤© ¤ , ¡<br />
Anmerkung: Für die Federverlängerung ist nur der horizontale Anteil zu berücksichtigen.<br />
a) <br />
b) ¥<br />
¡ ¡ ©<br />
¤¦¥ ¡ ©<br />
¥ § ©£¢ ¥ § © <br />
©<br />
£<br />
¢<br />
¦<br />
<br />
©<br />
©<br />
<br />
¡ ©<br />
¤©<br />
¢<br />
©<br />
¢ ©<br />
¤ ¡ £¦¥ ¥¤¢ <br />
¡ ©<br />
¤<br />
£ ¢<br />
¦<br />
<br />
©<br />
©<br />
© ¢ <br />
¡<br />
<br />
©<br />
¢ ©<br />
¤©
c)<br />
d) ¡<br />
¢ £ ¢<br />
¢ ¤ ¢<br />
¡ e)<br />
£ ¢<br />
f) ¢ ¤<br />
¤ ¢<br />
¡ ©<br />
¤<br />
£ ¢<br />
¦<br />
¢ ¤ ¡ ©<br />
<br />
¡ ©<br />
¤<br />
¢ ¤ ¡<br />
<br />
<br />
<br />
©<br />
©<br />
¡ ¡ ©<br />
<br />
¢ ¡ ¡ ©<br />
© ¢ <br />
©<br />
<br />
¡ ¡ ©<br />
©£¢ ¥¨§ © <br />
©<br />
£¦¥¨§<br />
¢<br />
£ ¥ § ©£¢ ¥ § © ¥ ¤ ¡ ¥¨§ © ¦¤<br />
£ ¥ § ©£¢ ¥ § © ¥¤¢ ¤ ¡ ¥¨§ ©£¢ ¦¤<br />
<br />
£ ¡ ¡ ¤ ¢ ¡ ¡ ¦¤<br />
¤ ¡ <br />
© ¡ ©<br />
¢ ¡ ¡ ¢ £ ¡ ¡ ¤ ¦¤<br />
¥<br />
<br />
¥<br />
£ ¡ ¡ ¤ ¤ ¡<br />
¥<br />
©<br />
£ ¡ ¡ ¤ <br />
©<br />
£ ¡ ¡ <br />
©<br />
<br />
<br />
¤ ¡ £ ¥ ¥ ¢ <br />
¥¤
7. Aufgabe: (MV)<br />
Bezüglich der orthonormalen Basisvektoren ¢¡ ¥ ¡ ©¤£ im Euklidischen Vektorraum IE © sind die<br />
kontravarianten Basisvektoren<br />
<br />
<br />
¥<br />
©<br />
¢ ¡ ¥ ¡ ©<br />
¥ ¡ © ¡<br />
sowie der zweistufige Tensor<br />
gegeben.<br />
¥ ¢ §¦ <br />
Bestimmen Sie:<br />
©¨ ¦ mit<br />
¢ ¢ §¦ £ <br />
¢<br />
¦<br />
¢ ¦<br />
<br />
a) Die kovarianten Basisvektoren .<br />
b) Die ko- und Koeffizienten<br />
und von<br />
kontravarianten<br />
c) Die Koeffizienten ¢ ¦ ¢<br />
und<br />
gilt.<br />
d) Die Spur sowie die Determinante von ¥ .<br />
¥ ¦<br />
¡ ¥ ¦<br />
¡ ©<br />
a)<br />
© ¦ ¡ ¥ <br />
<br />
¢<br />
¡ ©<br />
<br />
b) ¥ ¢ ¥<br />
c)<br />
© <br />
§¦<br />
¦<br />
¦ ¢ ¢<br />
£ ¢ ¢<br />
d) tr ¥ <br />
¢<br />
¢<br />
¥<br />
<br />
¦ ¥<br />
¦<br />
¦<br />
©<br />
¦<br />
<br />
¦<br />
§¦ des Tensors ¥ , so dass ¥ ¢ ¦ <br />
det ¥<br />
¦ £ ¦ ¦ ¢ ¢<br />
¥<br />
<br />
det ¢ ¦ ¢ <br />
<br />
¨ ¦ und ¥ ¢<br />
¥ ¥ .<br />
§¦ ¨ ¦