pr ¨ufung tm iii und tm iii,iv - Lehrstuhl für Technische Mechanik ...
pr ¨ufung tm iii und tm iii,iv - Lehrstuhl für Technische Mechanik ...
pr ¨ufung tm iii und tm iii,iv - Lehrstuhl für Technische Mechanik ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
ERGEBNISSE<br />
PRÜFUNG TM III UND TM III,IV<br />
<strong>Lehrstuhl</strong> <strong>für</strong> <strong>Technische</strong> <strong>Mechanik</strong>, Un<strong>iv</strong>ersität Kaiserslautern<br />
1. Aufgabe: (MV, BI)<br />
m4<br />
Prof. Dr.-Ing. P. Steinmann<br />
l<br />
WS 03/04, 03.03.2004<br />
A B<br />
g<br />
m1<br />
ϕ<br />
R<br />
S1<br />
l<br />
2<br />
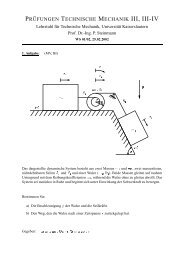
Das dargestellte dynamische System besteht aus zwei Walzen m1 <strong>und</strong> m2 mit den Radien R<br />
bzw. r, aus einem masselosen, <strong>und</strong>ehnbaren Seil, sowie der Masse m3 <strong>und</strong> dem Balken m4. Der<br />
in A gelenkig gelagerte Balken liegt im Abstand l vom Lager auf der Walze m1 auf <strong>und</strong> übt<br />
durch Reibung (µ) eine Bremswirkung auf das System aus. Die Walze m1 ist in S1 reibungsfrei<br />
gelagert, das Seil in B befestigt.<br />
Das Sytem sei zunächst in Ruhe.<br />
Bestimmen Sie<br />
ψ<br />
a) die Beschleunigung, mit der sich die Masse m3 im Schwerefeld der Erde nach unten<br />
bewegt;<br />
b) die Beschleunigung der Masse m3 <strong>für</strong> m4 = 6m <strong>und</strong> die Seilkräfte <strong>für</strong> diesen Fall. Welche<br />
Winkelbeschleunigung erfährt dabei die Walze m1?<br />
c) die erforderliche Masse m4 des Balkens, so dass das System bei einem Haftkoeffizienten<br />
von µ = 0.3 noch in Ruhe bleibt.<br />
Gegeben: m1 = 4m, m2 = 2m, m3 = 7m, l, R, r, µ, g<br />
µ<br />
S2<br />
r<br />
m3<br />
m2<br />
x2
9m −<br />
a) ¨x2 =<br />
3<br />
2 µm4<br />
g<br />
18m<br />
1 − µ<br />
b) ¨x2 = g,<br />
2<br />
¨ϕ = 2<br />
R ¨x2<br />
1 − µ<br />
=<br />
R g<br />
<br />
SI = 2 + 5<br />
2 µ<br />
<br />
mg<br />
<br />
5<br />
SII = + 2µ mg<br />
2<br />
c) m4 = 20m
2. Aufgabe: (MV, BI)<br />
l<br />
l<br />
cF<br />
B<br />
A<br />
C<br />
2<br />
3<br />
cM2<br />
1<br />
4<br />
l<br />
l<br />
Das dargestellte, ebene System bestehe aus vier masselosen Körpern, einer Normalkraftfeder<br />
cF sowie einer Drehfeder cM2. Die starren Körper 1, 2 <strong>und</strong> 3 sind durch Momentengelenke in<br />
A <strong>und</strong> B miteinander verb<strong>und</strong>en. Der Körper 4 besitze die Biegesteifigkeit EI <strong>und</strong> sei in C fest<br />
an den Körper 3 angeschlossen.<br />
Bestimmen Sie<br />
a) ein Ersatzsystem, das <strong>für</strong> die dargestellte Belastung F geeignet ist,<br />
b) die kritischen Lasten sowie die zugehörigen Knickformen des infinitesimal ausgelenkten,<br />
zutreffenden Ersatzsystems unter den Annahmen cF = 11 EI<br />
l3 <strong>und</strong> cM2 = 3 EI<br />
.<br />
l<br />
Gegeben: l, EI, cF , cM2<br />
a)<br />
ϕ2<br />
ϕ1<br />
cF<br />
F<br />
cM2<br />
cM1 = 3 EI<br />
l<br />
cM1<br />
b)<br />
0,17<br />
l<br />
0,83<br />
F1 = 7.36 EI<br />
l 2<br />
F<br />
2,2<br />
1,2<br />
F1 = 23.64 EI<br />
l 2
3. Aufgabe: (MV, BI)<br />
h<br />
00000000000000000000<br />
11111111111111111111<br />
00000000000000000000<br />
11111111111111111111<br />
00000000000000000000<br />
11111111111111111111<br />
B<br />
C<br />
m1<br />
ℓ<br />
45 ◦<br />
A<br />
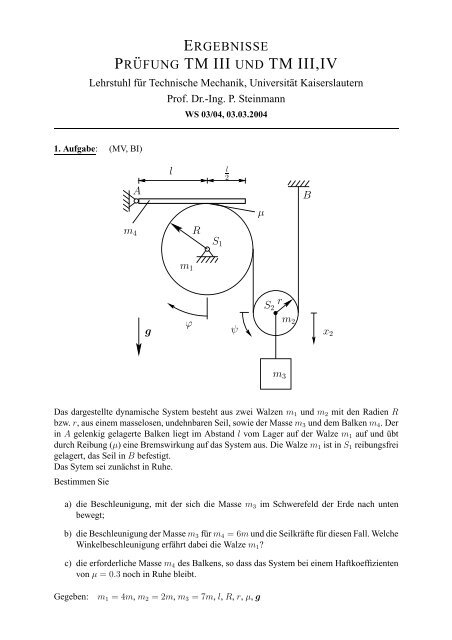
Eine Punk<strong>tm</strong>asse m1 wird durch einen masselosen starren Stab der Länge ℓ, der im Punkt B<br />
befestigt ist, gehalten. Der Stab schließt im Punkt B mit der vertikalen einen Winkel von 45 ◦<br />
ein. Eine ruhende, homogene Kreisscheibe (Masse m2 , Radius R, Schwerpunkt S) ist im Punkt<br />
C gelenkig gelagert. Unter dem Einfluss der Schwerkraft bewegt sich die Punk<strong>tm</strong>asse m1 auf<br />
die Kreisscheibe zu <strong>und</strong> trifft sie im Punkt A (die Punkte A <strong>und</strong> S liegen auf einer Geraden).<br />
Der Stoß erfolgt elastisch.<br />
Bestimmen Sie<br />
a) die Winkelgeschwindigkeit ω1a der Punk<strong>tm</strong>asse kurz vor dem Stoß;<br />
b) die Winkelgeschwindigkeit ω2b der Kreisscheibe kurz nach dem Stoß;<br />
c) den Geschwindigkeitsvektor v2b des Kreisscheibe im Punkt A kurz nach dem Stoß;<br />
d) die Stoßkräfte im Auflager C.<br />
Gegeben: m1, m2, ℓ, R, h, g<br />
a) ω1a =<br />
b) ω2b = 1<br />
R<br />
c) v A 2bn<br />
v A 2bt<br />
g<br />
l (2 − √ 2)<br />
= R ω2b<br />
= −R ω2b<br />
4m1<br />
2m1 + 3m2<br />
d) Ĉn = − 1<br />
2 m2 R ω2b<br />
Ĉy = 0<br />
ω1a<br />
S<br />
R<br />
m2<br />
g
4. Aufgabe: (MV)<br />
A<br />
a<br />
l<br />
c<br />
Ein starrer, masseloser Arm der Länge l ist in A drehbar aufgehängt <strong>und</strong> durch eine Feder mit<br />
der Federkonstanten c abgestützt. Am freien Ende trägt er die Punk<strong>tm</strong>asse m mit einem Zeiger,<br />
der je nach Vertikalbewegung des Gehäuses die Ausschläge des Armes auf einer Skala anzeigt.<br />
Das Gehäuse des Schwingungsmessgerätes wird nach dem Gesetz xE(t) = ˆxE sin Ωt bewegt.<br />
Bestimmen Sie <strong>für</strong> kleine Auslenkungen<br />
1. a) die Bewegungsgleichung des Massenpunktes im Bezug auf das Gehäuse.<br />
b) die Eigenfrequenz des Schwingers in Abhängigkeit gegebener Größen.<br />
2. a) die Lösung der Bewegungsgleichung <strong>für</strong> den eingeschwungenen Zustand.<br />
b) die Phasenverschiebung der Lösung gegenüber der Erregerschwingung.<br />
m<br />
3. das Verhältnis a(Ω)<br />
(in Abhängigkeit von Ω), so dass die gemessene Amplitude doppelt<br />
l<br />
so groß ist wie die Erregeramplitude ˆxE.<br />
Gegeben: a, l, m, c, xE = ˆxE sin(Ωt)<br />
sin(α + β) = sin(α) cos(β) + cos(α) sin(β)<br />
Hinweis: Gravitation kann vernachlässigt werden
1. a) x = xE + xr<br />
¨xr + c<br />
<br />
a<br />
2 xr = ˆxEΩ<br />
m l<br />
2 sin(Ωt)<br />
b) ω2 = c<br />
<br />
a<br />
2 m l<br />
2. a) xr(t) =<br />
3.<br />
b) ϕ = π<br />
a<br />
l =<br />
V = 2 : a<br />
l =<br />
c<br />
m<br />
−Ω2 2 a<br />
l<br />
m<br />
c<br />
m<br />
2c Ω<br />
− Ω 2<br />
V − 1<br />
V<br />
Ω<br />
ˆxE sin(Ωt − π)
5. Aufgabe: (MV)<br />
A<br />
c1<br />
m1<br />
x<br />
Auf einer horizontalen Unterlage bewegt sich reibungsfrei ein starrer Körper (Masse m1), der<br />
über eine Feder (Steifigkeit c2, Länge l) mit einem gelenkig gelagerten starren Balken (Masse<br />
m2, Länge R) verb<strong>und</strong>en ist. Weiterhin ist der starre Körper (m1) mit der im Punkt A gelagerten<br />
Feder (Steifigkeit c1) verb<strong>und</strong>en. Die Bewegungen des starren Körpers <strong>und</strong> des starren Balken<br />
sollen durch die generalisierten Koordinaten x <strong>und</strong> ϕ beschrieben werden. Die Federn (c1, c2)<br />
seien <strong>für</strong> x = 0 <strong>und</strong> ϕ = 0 entspannt.<br />
Bestimmen Sie unter Verwendung der Koordinaten x <strong>und</strong> ϕ<br />
a) die potentielle Energie Π = Π(x, ϕ) des Gesamtsystems<br />
b) die kinetische Energie T = T(x, ϕ, ˙x, ˙ϕ) des Gesamtsystems<br />
c) die Bewegungsgleichungen <strong>für</strong> große Auslenkungen mit den LAGRANGEschen Gleichungen<br />
2. Art<br />
Gegeben: c1, c2, l, m1, m2, R, g<br />
a) Π(x, ϕ) = 1/2c1x 2<br />
+ 1/2c2((R sin ϕ − x) 2 + (R − R cosϕ) 2 )<br />
+ m2g(−1/2Rcos ϕ + 1/2R)<br />
b) T(x, ϕ, ˙x, ˙ϕ) = 1/2m1¨x 2 + 1/2Θ¨ϕ 2 mit Θ = m2l 2 /3<br />
c) m1¨x + c1x − c2R sin ϕ + c2x = 0<br />
Θ¨ϕ + 1/2R(−2c2 cos ϕx + 2c2R sin ϕ + m2g sin ϕ) = 0<br />
l<br />
c2<br />
m2<br />
ϕ<br />
R<br />
g