TM III UND TM III,IV - Lehrstuhl für Technische Mechanik ...
TM III UND TM III,IV - Lehrstuhl für Technische Mechanik ...
TM III UND TM III,IV - Lehrstuhl für Technische Mechanik ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
ERGEBNISSE<br />
<strong>TM</strong> <strong>III</strong> <strong>UND</strong> <strong>TM</strong> <strong>III</strong>,<strong>IV</strong><br />
<strong>Lehrstuhl</strong> <strong>für</strong> <strong>Technische</strong> <strong>Mechanik</strong>, Universität Kaiserslautern<br />
1. Aufgabe: (MV, BI)<br />
x1<br />
I<br />
B<br />
m1<br />
r<br />
Prof. Dr.-Ing. P. Steinmann<br />
SS 2002, 02.09.2002<br />
m2<br />
x2<br />
µG<br />
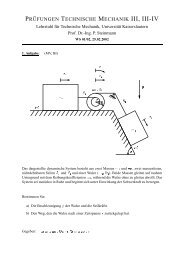
Das dargestellte dynamische System besteht aus den Massen m1 und m2, der Punktmasse m4,<br />
zwei masselosen, undehnbaren Seilen I und II, sowie der homogenen Walze der Masse m3.<br />
Die Punktmasse m4 ist über einen starren, masselosen Stab fest mit der Walze verbunden. Die<br />
Masse m2 gleitet auf einem rauhem Untergrund mit dem Reibkoeffizienten µG. Die beiden<br />
Rollen zur Führung des Seiles I seien masselos.<br />
Das System sei zunächst in Ruhe und beginne sich unter Schwerkrafteinfluß zu bewegen.<br />
Bestimmen Sie:<br />
a) die Winkelbeschleunigung ¨ϕ in Abhängigkeit des Winkels 0 ≤ ϕ ≤ π<br />
2 ;<br />
b) den Winkel ˆϕ, bei dem das System momentan nicht beschleunigt wird.<br />
Gegeben: m1, m2, m3, m4, R, r, µG, g<br />
<br />
−<br />
a) ¨ϕ =<br />
1<br />
2 m1<br />
<br />
− µGm2 + 2m4 cos ϕ g<br />
<br />
1<br />
4 m1 + m2 + 1<br />
2 m3<br />
<br />
+ 4m4 R<br />
⎛<br />
1<br />
⎜<br />
b) ϕ = arccos ⎝<br />
2 m1<br />
⎞<br />
+ µGm2⎟<br />
⎠<br />
2m4<br />
= k(ϕ)<br />
II<br />
A<br />
m3<br />
R<br />
01<br />
01<br />
01<br />
01<br />
01<br />
R<br />
g<br />
m4<br />
ϕ
2. Aufgabe: (MV, BI)<br />
m1<br />
c<br />
S1<br />
x1<br />
ϕ<br />
x2<br />
m2<br />
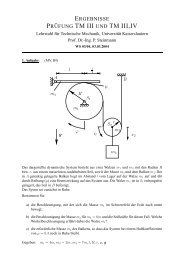
Das dargestellte System besteht aus zwei Massen m1 und m3, zwei massenlosen, nichtdehnbaren<br />
Seilen S1 und S2, einer homogenen Walze (m2, R) und einer Feder mit der Steifigkeit<br />
c. Die Feder ist nicht vorgespannt. Die Masse m3 gleitet auf dem rauhen Untergrund mit dem<br />
Reibungskoeffizienten µG. Die Walze rollt ohne zu gleiten.<br />
Das System sei zunächst in Ruhe und beginnt sich unter Einwirkung der Schwerkraft in positive<br />
x1-Richtung zu bewegen.<br />
Bestimmen Sie:<br />
R<br />
a) die an der Feder verrichtete Arbeit, wenn sich die Masse m1 um x1 absenkt und die dabei<br />
vom System geleistete Reibarbeit.<br />
b) die Geschwindigkeit der Masse m1 in Abhängigkeit der Koordinate x1.<br />
Gegeben: c, m1, m2, R, m3, µG, g, α<br />
a)<br />
b)<br />
A F ab = −Π F b = − 1<br />
2 cx2 1<br />
−Dab = A d ab = − 1<br />
2 m3gµ cosα x1<br />
v1(x1) =<br />
µG<br />
S2<br />
m3<br />
α<br />
g<br />
x3<br />
(an der Feder verichtete Arbeit)<br />
(vom System geleistete Reibarbeit)<br />
<br />
m1g x1 − 1/2 m3g[µ cosα + sin α]x1 − 1/2 cx 2 1<br />
1/2 m1 + 3/4 m2 + 1/8 m3
3. Aufgabe: (MV, BI)<br />
F<br />
∆θ<br />
1<br />
l2<br />
2<br />
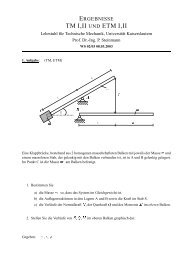
Das dargestellte ebene System sei entweder durch die Kraft F (Lastfall A) belastet oder der<br />
Temperaturerwärmung ∆θ (Lastfall B) ausgesetzt. Der abgebildete isotherme Ausgangszustand<br />
ist spannungsfrei.<br />
a) Bestimmen Sie <strong>für</strong> Lastfall A (F > 0, ∆θ = 0) mit Hilfe geeigneter Euler–Fälle<br />
1) eine obere Schranke <strong>für</strong> die kritische Last (Fo ≥ Fk),<br />
2) eine untere Schranke <strong>für</strong> die kritische Last (Fu ≤ Fk).<br />
b) Bestimmen Sie <strong>für</strong> Lastfall B (F = 0, ∆θ > 0)<br />
1) ein geeignetes Ersatzsystem,<br />
2) den Grenzwert der maximalen Temperaturerwärmung ∆θ, so dass die Normalkraft<br />
des Körpers 1 unterhalb der entsprechenden Euler–Knicklast bleibt.<br />
Gegeben: E1 = E2 = E, α1 = α, A1, I1, I2, l1, l2<br />
l1
a1)<br />
a2)<br />
b1)<br />
∆θ<br />
F<br />
F<br />
A1 → ∞<br />
A1 → 0<br />
cF<br />
3.EF. =⇒ Fo = π2EI2 √ 2 = 2π<br />
2l2<br />
2EI2<br />
l2 2<br />
1<br />
2<br />
1.EF. =⇒ Fu = π2EI2 π2<br />
2 =<br />
[2 l2] 4<br />
cF = 3 EI2<br />
l 3 2<br />
b2) Federkraft: F = cFu = 3 EI2<br />
l 3 2<br />
äquivalenter Euler Fall: Fk = π 2EI1<br />
l 2 1<br />
(2.EF.)<br />
Stoffgesetz: ε = u<br />
∆θk = π2 I1<br />
αl 3 1<br />
l 3 2<br />
3EI2<br />
+ l1<br />
<br />
A1<br />
l1<br />
= σ<br />
E<br />
u<br />
+ α∆θ<br />
EI2<br />
l 2 2
4. Aufgabe: (MV, BI)<br />
R<br />
R<br />
m1<br />
1<br />
2 R<br />
R R<br />
C<br />
A<br />
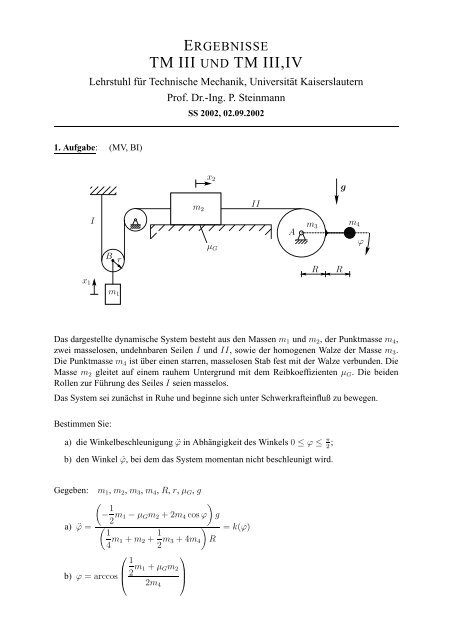
Ein im Punkt A gelagerter Stab mit der Masse m1 wird durch die Erdbeschleunigung g in<br />
Bewegung gesetzt und trifft im Punkt C auf die homogene Kreisscheibe (Radius R, Masse m2,<br />
Schwerpunkt S). Die Kreisscheibe befindet sich zunächst in Ruhe und rollt nach dem Stoss<br />
ohne zu gleiten. Der Stoss erfolgt elastisch.<br />
Bestimmen Sie:<br />
a) den Geschwindigkeitsvektor v1a des Stabes im Punkt C und dessen Winkelgeschwindigkeit<br />
ω1a kurz vor dem Stoss.<br />
b) kurz nach dem Stoss: Den Geschwindigkeitsvektorv1b des Stabes im Punkt C und dessen<br />
Winkelgeschwindigkeit ω1b. Den Geschwindigkeitsvektor v2b der Kreisscheibe im Punkt<br />
C und deren Winkelgeschwindigkeit ω2b. Weiterhin die Stosskräfte im Auflager A und in<br />
den Punkten B, C.<br />
Gegeben: m1 = m2 = m, R, g<br />
Hinweis: Der Einfluß der Schwerkraft ist während des Stoßvorganges zu vernachlässigen.<br />
S<br />
B<br />
R<br />
m2<br />
g
a)<br />
b)<br />
<br />
ω1a = 2 g<br />
R<br />
v1an = Rω1a und v1at = 0<br />
ω1b =<br />
ΘA<br />
ΘB<br />
ΘA<br />
ΘB<br />
ΘA<br />
ΘB<br />
= m1<br />
2m2<br />
ω1b = Kω1a<br />
− 1<br />
v1bn = Kω1aR<br />
v1bt = 0<br />
ω1a mit<br />
+ 1<br />
und<br />
ω2b = 1<br />
[K − 1]ω1a<br />
2<br />
ΘA<br />
ΘB<br />
ΘA<br />
ΘB<br />
v2bn = − 1<br />
[K − 1]ω1aR<br />
2<br />
v2bt = − 1<br />
2<br />
ˆF = − ΘB<br />
R<br />
[K − 1]ω1aR<br />
− 1<br />
+ 1<br />
<br />
1<br />
[K − 1] ω1a<br />
2<br />
Ân = Rm1ω1a [K − 1] − ΘB<br />
R<br />
<br />
Ât = 0<br />
<br />
ˆBn = m2 − 1<br />
<br />
[K − 1]ω1aR<br />
2<br />
<br />
ˆBt = m2 − 1<br />
<br />
[K − 1]ω1aR<br />
2<br />
= − 1<br />
3<br />
= K = const. ergibt sich<br />
<br />
1<br />
[K − 1] ω1a<br />
2
5. Aufgabe: (MV, BI)<br />
g<br />
x<br />
m<br />
Zwei Massen m und M sind über ein masseloses Seil und zwei masselose Umlenkrollen miteinander<br />
verbunden. Die Abmessungen der Umlenkrollen können vernachlässigt werden. Die<br />
Masse M gleitet reibungsfrei auf einer kreisförmige Bahn. Zur Zeit t = 0 ist das System in<br />
Ruhe und die Masse M befindet sich in A.<br />
Bestimmen Sie:<br />
a) die Verschiebung x, die Geschwindigkeit ˙x und die Beschleunigung ¨x der Masse m als<br />
Funktionen des Winkels α;<br />
b) die Winkelgeschwindigkeit ˙α als Funktion von α aus dem Energieerhaltungsgesetz;<br />
c) die Seilkraft <strong>für</strong> 0 < ϕ < π<br />
2 .<br />
Gegeben: m, M, R, g<br />
Hinweis: Für den Hilfswinkel α gilt: α = ϕ<br />
2<br />
a) x = 2 R sin α<br />
˙x = 2 R cosα · ˙α<br />
¨x = 2 R (cosα · ¨α − sin α · ˙α 2 )<br />
b) ˙α 2 = g<br />
R<br />
c) N = m g<br />
(M cos α − m) sin α<br />
M + m cos 2 α<br />
1 + cosϕ · cos ϕ (M cos<br />
− 2<br />
2 ϕ<br />
− m)<br />
2<br />
2 ϕ<br />
M + m cos<br />
2<br />
1 + m ϕ<br />
cos2<br />
M 2<br />
α<br />
A<br />
R<br />
M<br />
ϕ<br />
sin(2k) = 2 sin k cosk<br />
2 ϕ<br />
sin<br />
2<br />
O
6. Aufgabe: (MV)<br />
d<br />
m2<br />
m1<br />
m0<br />
r2<br />
r1<br />
0000000<br />
1111111 0000000<br />
1111111<br />
Zwei homogene Kreisscheiben (Radius r1 bzw. r2, Masse m1 bzw. m2) sind fest miteinander<br />
verbunden und reibungsfrei drehbar gelagert. An die große Scheibe sind eine Feder (Steifigkeit<br />
c) sowie ein Dämpfer (Dämpfungskonstante d) angeschlossen. An der kleinen Scheibe<br />
hängt eine Masse m0.<br />
a) Bestimmen Sie die Eigenkreisfrequenz sowie den Dämpfungsgrad der Drehschwingung<br />
des Systems.<br />
b) Das System befinde sich im statischen Gleichgewicht. Berechnen Sie die Drehbewegung<br />
<strong>für</strong> den Fall, dass das Seil, an dem die Masse m0 hängt, reißt.<br />
Nehmen Sie an, dass das System schwach gedämpft ist.<br />
Gegeben: r1, r2, m0, m1, m2, d, c, g<br />
cr 2 2<br />
a) ω2 =<br />
Θ + m0 r2 1<br />
=<br />
2cr 2 2<br />
m1r 2 1 + m2r 2 2 + 2m0 r 2 1<br />
dr2<br />
D =<br />
2 c (Θ + m0r2 1 )<br />
b) ϕ(t) = ϕ0e−Dωt <br />
D<br />
cosωdt + √<br />
1 − D2 <br />
sin ωdt<br />
c<br />
g
7. Aufgabe: (MV)<br />
g<br />
y<br />
l<br />
q1<br />
q2<br />
Auf einer horizontalen Unterlage bewegt sich reibungsfrei ein starrer Balken 1 (Masse m1,<br />
Länge 2 l) in dessen Mitte ein weiterer starrer Balken 2 (Masse m2, Länge 2 l) gelenkig gelagert<br />
ist. Die Bewegungen der Balken 1 und 2 sollen durch die generalisierten Koordinaten q1 bzw.<br />
q2 bezüglich eines inertialen Rechtssystems (x,y,z) beschrieben werden. Der Verdrehung des<br />
Balkens 2 wirkt eine lineare Drehfeder (Federsteifigkeit c) entgegen, die bei q2 = 0 entspannt<br />
ist (siehe Abb.).<br />
Berechnen Sie unter Verwendung der Koordinaten q1 und q2<br />
a) die potentielle Energie Π = Π(q1, q2) des Gesamtsystems,<br />
b) die kinetische Energie T = T(q1, q2, q1, ˙ q2) ˙ des Gesamtsystems,<br />
c) die Bewegungsgleichungen <strong>für</strong> kleine Auslenkungen mit den LAGRANGEschen Gleichungen<br />
2. Art und<br />
d) die Eigenkreisfrequenz ω0 des Systems.<br />
Gegeben: m1, m2, l, c, g<br />
a) Π = −m2 g l cosq2 + 1<br />
2 c q2 2<br />
b) T = 1<br />
2 (m1+ m2) ˙q 2 1 + m2 l ˙q1 ˙q2 cosq2 + 2<br />
3 m2 l 2 ˙q 2 2<br />
c) (m1+ m2) ¨q1 + m2 l ¨q2 = 0<br />
m2 l ¨q1 + 4<br />
3 m2 l 2 ¨q2 + (m2 g l + c)q2 = 0<br />
<br />
<br />
g<br />
<br />
d) ω0 = l<br />
<br />
4<br />
<br />
3 −<br />
+ c<br />
m2 l 2<br />
1<br />
1 + m1<br />
m2<br />
l<br />
c<br />
2<br />
1<br />
x