PR ¨UFUNG TM III UND TM III,IV - Lehrstuhl für Technische Mechanik
PR ¨UFUNG TM III UND TM III,IV - Lehrstuhl für Technische Mechanik
PR ¨UFUNG TM III UND TM III,IV - Lehrstuhl für Technische Mechanik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
1. Aufgabe: (<strong>TM</strong> <strong>III</strong>)<br />
ERGEBNISSE<br />
<strong>PR</strong>ÜFUNG <strong>TM</strong> <strong>III</strong> <strong>UND</strong> <strong>TM</strong> <strong>III</strong>,<strong>IV</strong><br />
<strong>Lehrstuhl</strong> <strong>für</strong> <strong>Technische</strong> <strong>Mechanik</strong>, TU Kaiserslautern<br />
00 11 B0<br />
100<br />
11 01<br />
00 11 01<br />
00 11 01<br />
00 11 01<br />
00 11 01<br />
SS 2009, 24.08.2009<br />
α<br />
A<br />
O<br />
00000 11111<br />
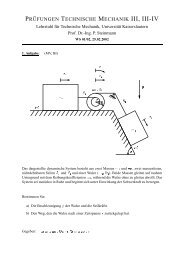
Ein Kurbelgetriebe besteht aus der Kurbel OA und der Pleuelstange AB. Die Kurbel wird mit<br />
der konstanten Winkelgeschwindigkeit ω0 angetrieben.<br />
Bestimmen Sie <strong>für</strong> die skizzierte Lage<br />
a) den Betrag und die Richtung des Geschwindigkeits- und Beschleunigungsvektors im<br />
Punkt A,<br />
ω0.<br />
b) die Geschwindigkeitspole der Kurbel und der Pleuelstange,<br />
c) die Winkelgeschwindigkeit und die Winkelbeschleunigung der Pleuelstange,<br />
d) den Betrag und die Richtung des Geschwindigkeitsvektors im Punkt B.<br />
Gegeben: ω0, a, b, α = 30 ◦<br />
b<br />
a
PSfrag<br />
b)<br />
00 11 B 00 11 01<br />
01<br />
00 1100<br />
11 01<br />
01<br />
00 1100<br />
11 01<br />
01<br />
vB<br />
2<br />
B<br />
00 110<br />
10<br />
10<br />
1<br />
00 110<br />
10<br />
10<br />
1<br />
00 110<br />
10<br />
10<br />
1<br />
00 110<br />
10<br />
10<br />
1<br />
ωAB<br />
1<br />
c) ωAB, ˙ωAB<br />
.<br />
α<br />
A<br />
O<br />
| ωAB| = a<br />
b cos α ω0<br />
˙ωAB = ω 2 AB<br />
tan α<br />
| ˙ωAB| = a2 ω 2 0<br />
b 2 cos 2 α<br />
P<br />
ω0<br />
0000 1111<br />
0000 1111<br />
.<br />
tan α<br />
˙<br />
d) vB = −a ω0 tan α ey<br />
O<br />
y<br />
A<br />
00000 11111<br />
00000 11111<br />
.<br />
vA<br />
vA<br />
x<br />
ωAB = a<br />
b cos α ω0 ez<br />
ωAB = | ˙ωAB| ez<br />
|vB| = −a ω0 tanα<br />
a) den Betrag und die Richtung des<br />
Geschwindigkeits- und Beschleunigungsvektors<br />
im Punkt A:<br />
vA = ω0aex<br />
aA = −ω 2 0 aey<br />
MP (1) = O<br />
MP (2) = P .<br />
|vA| = ω0 a<br />
| aA| = ω 2 0 a
2. Aufgabe: (<strong>TM</strong> <strong>III</strong>)<br />
Θ2<br />
x<br />
R<br />
m<br />
00 11<br />
00 11<br />
ϕ2<br />
r<br />
α<br />
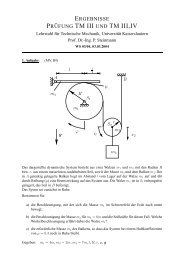
Bei einem Mechanismus wird eine Walze (r, m1) durch ein konstantes Moment M0 angetrieben.<br />
Die Walze treibt eine Seiltrommel (r, R, Θ2) ohne Schlupf an. An der Seiltrommel hängt die<br />
Einzelmasse m.<br />
a) Bestimmen Sie die kinematischen Beziehungen zwischen den Koordinaten ϕ1, ϕ2 und x.<br />
ϕ1<br />
00 11<br />
00 1101<br />
b) Stellen Sie die kinetischen Gleichungen <strong>für</strong> die Teilsysteme auf.<br />
c) Bestimmen Sie die Beschleunigung der Einzelmasse ¨x.<br />
d) Welches Antriebsmoment M0 ist notwendig, damit das Systems in Ruhe bleibt ?<br />
e) Bestimmen Sie <strong>für</strong> den Sonderfall M0 = 0 die Geschwindigkeit der Einzelmasse m,<br />
wenn die Masse aus der Ruhelage eine Fallstrecke h durchlaufen hat. Welche Zeit T wird<br />
hier<strong>für</strong> benötigt ?<br />
Gegeben: m, r, α, M0, h, sowie m1 = 2m, Θ2 = 1<br />
4 mR2 , R = 2r<br />
r<br />
m1<br />
M0<br />
g
a) x = rϕ2, ϕ1 = 2ϕ2<br />
b) Freikörperbilder<br />
v<br />
<strong>III</strong><br />
S<br />
G3<br />
x<br />
dynamischen Gleichungen<br />
ω2<br />
S<br />
Ay<br />
00 11<br />
00 11<br />
II<br />
G2<br />
H<br />
Ax<br />
I : ↑: By − G1 + N sin α + H cos α= 0<br />
→: Bx + N cos α − H sin α = 0<br />
<br />
B : M0 − Hr =Θ1 ¨ϕ1 (1)<br />
II : ↑: Ay − S − G2 − N sin α − H cosα= 0<br />
→: Ax − N cosα + H sin α = 0<br />
<br />
A : −Sr + HR =Θ2 ¨ϕ2 (2)<br />
<strong>III</strong> : ↑: m¨x=S − G3 (3)<br />
c) a = M0 g<br />
−<br />
3mr 6<br />
d) M0 = r2 mg<br />
R<br />
e) v(t) = − g<br />
t, T =<br />
6<br />
<br />
12 h<br />
g<br />
α<br />
N<br />
H<br />
N<br />
ω1<br />
By<br />
00 11<br />
00 1101<br />
I<br />
G1<br />
M0<br />
Bx<br />
g
3. Aufgabe: (<strong>TM</strong> <strong>III</strong>)<br />
m<br />
S<br />
0000 1111<br />
0000 1111 r<br />
0000 1111<br />
0000 1111<br />
v0<br />
A C<br />
D E<br />
01<br />
01<br />
00000000000000<br />
11111111111111 0000000<br />
1111111 01<br />
01<br />
00000000000000<br />
11111111111111<br />
0000000000000000000<br />
1111111111111111111 h0<br />
10 1<br />
01<br />
01<br />
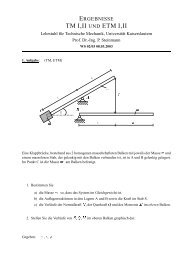
Eine Walze (r, m) rutscht ohne zu rollen mit konstanter Geschwindigkeit v0 auf einer horizontalen<br />
Eisfläche bis zur Stufe CD. Die Walze stößt gegen D und rollt ohne zu gleiten über die<br />
Kante auf die Ebene DE. Im Folgenden rollt die Walze ohne zu gleiten über die Ebene DE.<br />
Bestimmen Sie<br />
a) die Winkelgeschwindigkeit der Walze unmittelbar nach dem Stoß mit D,<br />
b) den Energieverlust der Walze durch den Stoß,<br />
c) die Winkelgeschwindigkeit und die kinetische Energie der Walze auf der Ebene DE,<br />
d) den Kraftstoß ˆ F auf die Walze.<br />
Gegeben: m, v0, r, h
a) ¯ω =<br />
2v(r − h)<br />
3r 2<br />
0000 1111 vS ¯<br />
0000 1111<br />
0000 1111<br />
vS 0000 1111<br />
0000 1111 000 111<br />
A B C<br />
b) der Energieverlust<br />
∆Ek = mv 2<br />
c) ω ∗ =<br />
<br />
1 1<br />
−<br />
2 3<br />
4v 2 (r − h) 2<br />
9r 4<br />
S<br />
β ¯ω<br />
y<br />
ˆFy<br />
D<br />
0000 11110000000<br />
1111111<br />
ˆFx<br />
0000000<br />
1111111<br />
0000000<br />
1111111<br />
<br />
1 − h<br />
<br />
2<br />
r<br />
− 4gh<br />
3r 2<br />
T ∗ = 1<br />
2ΘD (ω∗ ) 2 = 1 3<br />
·<br />
2 2 mr2 (ω ∗ ) 2<br />
d) Kraftstoß ˆ F in der Walze gegen Stufe DC<br />
ˆFx = m (v − r¯ω cosβ)<br />
ˆFy = mr¯ω sin β<br />
x<br />
A B C<br />
S<br />
G<br />
y<br />
000 111<br />
01<br />
000 111S<br />
.<br />
01<br />
01<br />
000 111 .<br />
0000 1111 01<br />
000 111<br />
01<br />
β<br />
¯ω 01<br />
0000000<br />
1111111<br />
0000000<br />
1111111 D<br />
0000000<br />
1111111<br />
ω∗<br />
v<br />
h<br />
∗ vS ¯ S
4. Aufgabe: (<strong>TM</strong> <strong>IV</strong>)<br />
Ein homogener Balken (Länge l, Masse m) ist wie abgebildet im Punkt A gelenkig gelagert<br />
und im Punkt B über einen viskosen Dämpfer (Dämpfungskonstante d) mit einem weiteren Lager<br />
verbunden. Zusätzlich besteht im Punkt C eine Verbindung zu einem horizontal geführten<br />
Kolben über eine Feder (Federkonstante c). Der Kolben wird dabei einer periodischen Weganregung<br />
u(t) = ū cos (Ωt) ausgesetzt.<br />
Der Einfluss der Erdbeschleuningung darf vernachlässigt werden.<br />
00000000<br />
11111111<br />
0000000<br />
1111111<br />
u(t)<br />
c<br />
l<br />
2<br />
C<br />
l<br />
2<br />
B<br />
m<br />
ϕ<br />
d<br />
45 ◦<br />
000 111 00 11<br />
000 111 00 11<br />
01<br />
00 11<br />
00 1101 01<br />
A<br />
0000 1111 0000 1111<br />
a) Zeichnen Sie das Freikörperbild <strong>für</strong> den Balken AC in der ausgelenkten Lage.<br />
b) Bestimmen Sie <strong>für</strong> die erregte Schwingung die Differentialgleichung des Winkels ϕ mit<br />
Hilfe der kinetischen Grundgleichung. Nehmen Sie dabei kleine Auslenkungen um die<br />
dargestellte Lage an.<br />
c) Bestimmen Sie <strong>für</strong> den eingeschwungenen Zustand die Amplitude und die Phasenverschiebung.<br />
Gegeben: l, m, c, d, ū, Ω
a)<br />
b)<br />
Fc 45 ◦<br />
<br />
C<br />
45 ◦<br />
B<br />
ϕ<br />
Fd<br />
45 ◦<br />
A : ΘA ¨ϕ=−Fd · l<br />
2 + Fc l sin(45 ◦ − ϕ)<br />
sin(45 ◦ − ϕ) = 1 √ 2 (1 − ϕ)<br />
ΘA = 1<br />
m l2<br />
3<br />
Fd = 1<br />
d l ˙ϕ<br />
2<br />
Fc = c(u − 1 √ 2 l ϕ), u(t) = ū cos(Ωt)<br />
A<br />
0000 1111 0000 1111<br />
0000 1111<br />
1<br />
3 m l2 ¨ϕ + 1<br />
4 d l2 ˙ϕ + 1<br />
2 c l2 ϕ = 1<br />
√ c l ū cos(Ωt), ω<br />
2 2 0 = 3<br />
2<br />
ϕ ′′<br />
+ 2 D ϕ ′<br />
+ ϕ = √ 2 ū<br />
l<br />
ξ ′′<br />
+ 2 D ξ ′<br />
+ ξ = √ 2 cos(η τ)<br />
cos(η τ), D = 3<br />
8<br />
d<br />
m ω0<br />
c<br />
m<br />
, ϕ = ξ ū<br />
l<br />
c) ˆ 1<br />
ξ = <br />
(1 − η2 ) 2 + 4 D2 η2 , ˆϕ = ˆ ξ ū 2 D η<br />
, tan ϕ =<br />
l 1 − η2
5. Aufgabe: (<strong>TM</strong> <strong>IV</strong>)<br />
Das abgebildete System besteht aus zwei starren, homogenen Balken (Massen m1, m2, Längen<br />
l1, l2), die über eine Feder (Federkonstante cN) gelenkig miteinander verbunden sind. Der untere<br />
Balken ist dabei am Ende fest mit einer homogenen, quadratischen Scheibe (Masse m3,<br />
Länge l3) verbunden und am anderen Ende über eine Drehfeder (Federsteifigkeit cT ) gelagert.<br />
Der Einfluss der Schwerkraft darf vernachlässigt werden.<br />
l3<br />
m3<br />
01<br />
1111<br />
01<br />
01<br />
010000<br />
01<br />
01<br />
0000 1111<br />
01<br />
01<br />
l3<br />
D<br />
C<br />
l2<br />
cN<br />
l1<br />
m1 00 11<br />
00 11<br />
00 11<br />
000000<br />
11111100<br />
11<br />
ϕ1000000<br />
11111100<br />
11<br />
000000<br />
111111<br />
m2 00 11<br />
00 11<br />
000000<br />
11111100<br />
11<br />
000000<br />
11111100<br />
11<br />
000000<br />
11111100<br />
11<br />
ϕ2000000<br />
111111cT<br />
000000<br />
111111<br />
000000<br />
111111<br />
a) Bestimmen Sie die kinetische und die potentielle Energie des Systems.<br />
b) Bestimmen Sie das Differentialgleichungsystem der Schwingungen in ϕ1 und ϕ2 mit Hilfe<br />
der Lagrange Gleichung zweiter Art. Nehmen Sie dabei kleine Auslenkungen um die<br />
dargestellte Lage an.<br />
c) Geben Sie die Eigenfrequenzen und die Amplitudenverhältnisse des Systems an.<br />
d) Skizzieren Sie die Eigenformen des Systems.<br />
Gegeben: m1 = m, m2 = 2 m, m3 = m<br />
2 , l1 = l, l2 = 2 l, l3 = l<br />
2 , cN, cT = 5 cN l 2<br />
A<br />
B
a) Kinetische Energie<br />
T = ml2<br />
2<br />
<br />
1<br />
3 · ˙ϕ2 1 + 75<br />
16 · ˙ϕ2 <br />
2<br />
Potentielle Energie<br />
Π = 1<br />
2 cN · l 2 6ϕ 2 2 − 2ϕ1ϕ 2 2 + ϕ2 <br />
1<br />
b) ml2<br />
3 ¨ϕ1 − cN · l 2 [ϕ2 − ϕ1] = 0<br />
75<br />
16 ml2 ¨ϕ2 − cN · l 2 [ϕ1 − 6ϕ2] = 0<br />
c) ω 4 − 321<br />
75<br />
<br />
cN<br />
ω1 = 1, 81<br />
m<br />
<br />
cN − m<br />
3 ω2 i<br />
· cN<br />
m ω2 + 240<br />
75 · c2N m<br />
2 = 0<br />
<br />
cN<br />
ω2 = 0, 98<br />
m<br />
<br />
· A1 − cN · A2 = 0<br />
µ1 = −0, 09 µ2 = +0, 68<br />
d) ω = ω1<br />
A1 = 1 ⇒ A2 = −0, 09<br />
ω = ω2<br />
A1 = 1 ⇒ A2 = +0, 68<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11<br />
00 11