PR ¨UFUNG TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik
PR ¨UFUNG TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik
PR ¨UFUNG TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
1. Aufgabe: (<strong>TM</strong>, E<strong>TM</strong>)<br />
2a<br />
PSfrag replacements<br />
ERGEBNISSE<br />
<strong>PR</strong>ÜFUNG <strong>TM</strong> I,<strong>II</strong> <strong>UND</strong> E<strong>TM</strong> I,<strong>II</strong><br />
<strong>Lehrstuhl</strong> <strong>für</strong> <strong>Technische</strong> <strong>Mechanik</strong>, TU Kaiserslautern<br />
a<br />
x1<br />
C<br />
Prof. Dr.-Ing. P. Steinmann<br />
I<br />
SS 2005 03.09.2005<br />
2a<br />
B<br />
¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡ ¡<br />
¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢¡¢<br />
¡ £<br />
¤ ¡ ¥<br />
¥ ¤<br />
£<br />
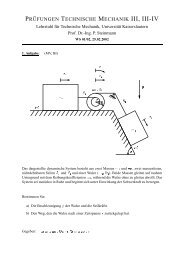
Gegeben ist ein System aus zwei masselosen Rahmen. Die Rahmen sind in C gelenkig miteinander<br />
verbunden. Der obere Rahmen ist in A verschieblich gelagert und durch eine konstante<br />
Streckenlast belastet. Der untere Rahmen ist in D gelenkig und in E verschieblich gelagert.<br />
Bestimmen Sie:<br />
a) die Auflagerkräfte in A, D und E sowie die Gelenkkräfte in C,<br />
b) die Funktionen der Schnittgrößen N, Q und M <strong>für</strong> die Bereiche I und <strong>II</strong> bzgl. der eingezeichneten<br />
Koordinaten x1 und x2,<br />
c) Ort und Größe des maximalen Biegemomentes im Bereich <strong>II</strong>.<br />
d) Stellen Sie die Funktionen mit den Funktionswerten an den Bereichsgrenzen graphisch<br />
dar.<br />
Gegeben: qo, a, α = 45 ◦<br />
¥<br />
¥<br />
D<br />
¤<br />
¤<br />
a<br />
x2<br />
α<br />
2a<br />
<strong>II</strong><br />
E<br />
£<br />
£<br />
q<br />
A
a) A = 3<br />
2 qa; Cx = 0; Cy = 1<br />
2 qa; Dx = − 1<br />
2 qa; Dy = qa; E = − 1<br />
√ 2 qa<br />
PSfrag b) replacements<br />
0 ≤ x1 ≤ 2a √ 2a2<br />
PSfrag replacements<br />
0 ≤ x2 ≤ 2a<br />
45 ◦<br />
Cy<br />
Cy<br />
M<br />
N<br />
x1<br />
c) x2 = 1<br />
2 a; Mmax = 9<br />
8 qa2<br />
d)<br />
PSfrag replacements<br />
Cy<br />
x2<br />
qa 2<br />
N(x)<br />
Q(x)<br />
M(x)<br />
0<br />
+<br />
Q<br />
§<br />
§<br />
−<br />
+<br />
q<br />
¦<br />
¦<br />
x2<br />
N<br />
Q<br />
M<br />
1<br />
2 √ 2 qa<br />
1<br />
2 √ 2 qa<br />
qa 2<br />
1<br />
2 qa<br />
+<br />
qa 2<br />
N(x1) = − 1<br />
2 √ 2 qa<br />
Q(x1) =<br />
M(x1) =<br />
N(x2) = 0<br />
1<br />
2 √ 2 qa<br />
1<br />
2 √ 2<br />
qa x1<br />
Q(x2) = 1<br />
qa − qx2<br />
2<br />
M(x2) = qa 2 + 1<br />
2 qax2 − 1<br />
2 qx22 +<br />
0<br />
1, 125qa 2<br />
−<br />
0<br />
3<br />
2 qa
acements<br />
2. Aufgabe: (<strong>TM</strong>, E<strong>TM</strong>)<br />
b<br />
b<br />
b<br />
c<br />
c<br />
2a<br />
2a<br />
¨©¨<br />
¨©¨<br />
¨©¨<br />
Seil µ = 0<br />
α<br />
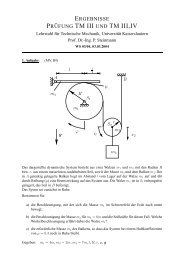
Gegeben ist die dargestellte Struktur mit einem Gesamtgewicht G. Die Struktur wird an einer<br />
Wand mit µ = 0 geführt und von einem Seil gehalten.<br />
Bestimmen Sie:<br />
a) die Seitenlänge c der Aussparung, so dass die x-Koordinate des Schwerpunkts der gesamten<br />
Struktur (bezüglich des dargestellten Koordinatensystems) bei x = a liegt;<br />
b) die Seilkraft S und die Führungskraft der Wand sowie deren Angriffspunkt;<br />
c) den oberen und unteren Grenzwinkel α, bei dem sich das System gerade noch im Gleichgewicht<br />
befindet.<br />
Gegeben: a, b, α und G<br />
a) c =<br />
<br />
b 2 − 2<br />
3 a2<br />
b) A = −S cos α<br />
S = G<br />
sin α<br />
ya = 2a − a tanα<br />
Die Angriffsrichtung der Seilkraft ist abhängig vom Winkelα.<br />
Der Angriffspunkt befindet sich bei M.<br />
c) Grenzwerte <strong>für</strong> α ergeben sich zu:<br />
α > 0: Für α ≤ 0 kann G nicht aufgenommen werden.<br />
α ≤ tan −1 (2) ≈ 63.4349 o : α ist durch die Struktur begrenzt (ya = 0).<br />
x<br />
y<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©<br />
©© ©©
3. Aufgabe: (<strong>TM</strong>)<br />
PSfrag replacements<br />
a<br />
z<br />
g<br />
y<br />
x<br />
➁<br />
➀<br />
➃<br />
➂<br />
A B C<br />
2a 2a<br />
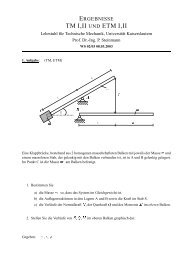
Der dargestellte Träger ist mit sechs Stäben an den Punkten A, B und D aufgehängt.<br />
Der Stab ➅ befindet sich in der x-z-Ebene. Der Träger wird zusätzlich zu seinem Eigengewicht<br />
G = 6 a m g durch eine Kraft P belastet, die in der x-y-Ebene unter dem Winkel ϕ zur x-Achse<br />
angreift.<br />
a) Berechnen Sie die Stabkräfte in den Stäben ➀ - ➅.<br />
b) Für welche Winkel ϕ ist Stab ➃ ein Zugstab?<br />
c) Bestimmen Sie die Schnittgrößenverläufe N, Q¯y, Q¯z, M¯x, M¯y und M¯z in dem Bereich<br />
D - C des Trägers, wobei das eingezeichnete ¯x-¯y-¯z-Koordinatensystem zu benutzen ist.<br />
Gegeben: a, ϕ, P , m, g<br />
a) Stabkräfte<br />
S1 = −a mg S2 = Px − Py S3 = 6a mg<br />
S4 = 2Py − Px S5 = a mg − Px S6 = √ 2 Px<br />
b) ➃ ist Zugstab, wenn ϕ < 26, 6 ◦<br />
c) Schnittgrößenverläufe<br />
P<br />
➅<br />
¯y<br />
¯x<br />
N(¯x) = 0 Q¯y(¯x) = Px Q¯z(¯x) = mg [a − ¯x]<br />
ϕ<br />
45 ◦<br />
M¯x(¯x) = 0 M¯y(¯x) = amg ¯x − 0.5 mg ¯x 2 M¯z(¯x) = Px ¯x<br />
¯z<br />
➄<br />
D<br />
2a
4. Aufgabe: (<strong>TM</strong>, E<strong>TM</strong>)<br />
PSfrag replacements<br />
y<br />
Q<br />
z<br />
S<br />
h<br />
a a<br />
Gegeben ist ein dünnwandiges Profil der Wandstärke h, welches durch die Querkraft Q belastet<br />
wird. Die Achsen x und y gehen durch den Schwerpunkt S.<br />
Bestimmen Sie:<br />
a) das Flächenträgheitsmoment Iyy<br />
b) den Schubflußverlauf t infolge Querkraft. Stellen Sie den Schubflußverlauf t graphisch<br />
dar.<br />
c) die maximale Schubspannung infolge Querkraft<br />
d) den Schubmittelpunkt<br />
Gegeben: Q, a, h<br />
a) Iyy = 7.647ha 3 b) Schubfluß t<br />
c) τQ,max = Q<br />
ah 0.397<br />
d) y A SM<br />
= −0.598 a<br />
PSfrag replacements<br />
Q<br />
a<br />
<br />
y<br />
S<br />
z<br />
0.196<br />
a<br />
a<br />
a<br />
symmetrisch<br />
0.397<br />
0.289 0.381
5. Aufgabe: (<strong>TM</strong>)<br />
PSfrag replacements<br />
l<br />
q0<br />
A G B<br />
EI<br />
EI<br />
x1<br />
1 1<br />
Zwei in G gelenkig miteinander verbundene masselose Balken sind wie abgebildet in A und B<br />
gelagert. Das System wird durch eine linear verteilte Streckenlast und ein Einzelmoment M0<br />
belastet.<br />
Bestimmen Sie:<br />
a) die Auflagerreaktion in B sowie die Gelenkkräfte,<br />
b) die Gleichungen der Biegelinie <strong>für</strong> beide Balken,<br />
c) die Absenkung des Gelenkes.<br />
Gegeben: q0, l, M0 = q0 l 2 , EI<br />
a) Gx = 0 ; Gy = q0 l ; B = q0 l<br />
b) Biegelinie <strong>für</strong> den Bereich 1:<br />
E I w1 = q0<br />
120 l x51 − q0 l<br />
6 x3 11<br />
1 +<br />
24 q0 l 3 x1 − 3<br />
10 q0 l 4<br />
Biegelinie <strong>für</strong> den Bereich 2:<br />
E I w2 = q0 l<br />
6 x32 + q0 l2 2 x2 29<br />
2 −<br />
30 q0 l 3 x2<br />
c) Absenkung des Gelenkes<br />
wG = w1(x1 = 0) = w2(x2 = l) = − 3<br />
10 q0 l 4<br />
x2<br />
M0
6. Aufgabe: (E<strong>TM</strong>, <strong>TM</strong><strong>II</strong>)<br />
PSfrag replacements<br />
3 a<br />
4 a<br />
C<br />
EI, EA<br />
A B<br />
Das dargestellte System besteht aus einem masselosen Balken (Dehnsteifigkeit EA, Biegesteifigkeit<br />
EI), der in A und B jeweils unverschieblich gelagert ist. Das System wird in Punkt C<br />
durch eine vertikale Kraft F belastet.<br />
Bestimmen Sie:<br />
a) die Auflagerreaktionen in A und B,<br />
b) die Verschiebung des Lastangriffspunktes,<br />
c) <strong>für</strong> den Fall EA → ∞: die Auflagerreaktionen und die Verschiebung des Lastangriffspunktes,<br />
d) <strong>für</strong> den Fall EI → ∞: die Auflagerreaktionen und die Verschiebung des Lastangriffspunktes.<br />
Gegeben: F, a, EI, EA<br />
Anmerkung: Die Energieanteile aus Querkraft sind zu vernachlässigen.<br />
a) By = 0.5 F ; Ay = 0.5 F ; Ax = −Bx =<br />
b) uF = (0.9 F − 2.4 Ax) a<br />
E A<br />
c) Ax = 2<br />
3 F ; uF = 0<br />
+ ( 40<br />
d) Ax = 0.375 F ; uF = 0<br />
F<br />
3 F − 20 Ax) a 3<br />
E I<br />
4 a<br />
1.2 − 10 E A a2<br />
3.2 − 15<br />
E I<br />
E A a2<br />
E I<br />
F
7. Aufgabe: (E<strong>TM</strong>)<br />
PSfrag replacements<br />
A<br />
➀<br />
ω1<br />
B<br />
α<br />
➁<br />
In dem skizzierten System aus den starren Stäben ➀, ➁, ➂ der Längen l1, l2, l3 wird Stab ➀<br />
mit der Winkelgeschwindigkeit ω1 in der angegebenen Richtung gedreht. Die Muffen C und<br />
D gleiten reibungsfrei. Bearbeiten Sie folgende Aufgaben:<br />
a) Zeichnen Sie die Richtungen der Geschwindigkeiten vB , vC , vD ein!<br />
b) Bestimmen Sie graphisch die Momentanpole Π1 , Π2 , Π3 der Stäbe ➀, ➁, ➂!<br />
c) Wieviele Freiheitsgrade hat das System?<br />
➂<br />
d) Bestimmen Sie <strong>für</strong> den bei α = 30˚ , ϕ = 45˚ vorliegenden Systemzustand die Beträge<br />
der Geschwindigkeiten vB , vC , vD!<br />
e) Bestimmen Sie unter den Voraussetzungen von d) die Beträge der Winkelgeschwindigkeiten<br />
ω2 , ω3 der Stäbe ➁, ➂!<br />
Gegeben: l1 = 0, 2 m , l2 = l3 = 0, 15 m , ω1 = 1, 2 s −1<br />
a) graphisch<br />
b) graphisch<br />
c) Einen.<br />
d) vB = 0, 24 ms −1 , vC = 0, 088 ms −1 , vD = 0, 328 ms −1<br />
e) ω2 = ω3 = 1, 96 s −1<br />
ϕ<br />
ϕ<br />
C<br />
D
8. Aufgabe: (E<strong>TM</strong> I)<br />
r<br />
m2, Θ<br />
PSfrag replacements m1<br />
x4<br />
R<br />
x1<br />
µ<br />
m3<br />
m2, Θ<br />
Zwei Massen m1 und m3 sowie zwei Walzen mit der Masse m2 und Trägheitsmoment Θ sind<br />
über dehnstarre Seile miteinander verbunden. Die Masse m1 rutscht auf einer Ebene mit dem<br />
Reibkoeffizient µ.<br />
a) Schneiden Sie das System vollständig frei und stellen Sie die kinematischen Beziehungen<br />
auf. Verwenden Sie die eingezeichneten Koordinaten.<br />
b) Bestimmen Sie die Beschleunigung ¨x3, wenn sich das System in Bewegung befindet.<br />
c) Bestimmen Sie die Seilkräfte während der Bewegung und <strong>für</strong> den Fall, dass das System<br />
in Ruhe ist<br />
Gegeben: m1, m2, m3<br />
R, r = 1<br />
R , Θ , g , µ<br />
2<br />
a) Masse 1: S1 − µN = m1 ¨x1, N = m1g<br />
S1 − µm1g = m1 ¨x1<br />
Walze links: 2S2 − S1 = 2m2 ¨x1<br />
Walze rechts: S3 − S2 = 1<br />
2 m2 ¨x2<br />
S4 + m2g − S3 − S2 = m2 ¨x2<br />
Masse 3: m3g − S4 = m3 ¨x3<br />
R<br />
b) ¨x3 = m3g + m2g − µm1g<br />
7<br />
2 m2 + m3 + m1<br />
c) S4 = m3g<br />
S3 = S2 = m3g + m2<br />
2<br />
S1 = 2S2<br />
g<br />
x2<br />
x3