TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik ...
TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik ...
TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
8. Aufgabe: (E<strong>TM</strong>)<br />
PSfrag replacements<br />
α<br />
x1<br />
m1<br />
µ<br />
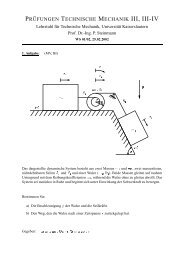
Das dargestellte System besteht aus einer Masse m1, einer im Punkt A gelagerten homogenen Walze<br />
(m2, R2) und einer zweiten homogenen Walze (m3, R3). Die Masse m1 gleitet auf einer schiefen<br />
Ebene (Winkel α) mit dem Reibkoeffizient µ und ist mittels eines dehnstarren Seils, das im Punkt B<br />
befestigt ist, mit den beiden Walzen verbunden. Das System sei zun ächst in Ruhe und beginne sich<br />
unter Einwirkung der Schwerkraft g zu bewegen. Die Massen m1, m2, m3, der Winkel alpha und der<br />
Reibkoeffizient µ seien so gew ählt, daß sich das System in positive x1-Richtung bewegt. Haft- und<br />
Gleitreibungskoeffizient seien hierbei gleich µ = µH = µG.<br />
Bestimmen Sie:<br />
a) die potentielle Energie des Systems in Abh ängigkeit von x3.<br />
b) die vom System geleistete Reibarbeit in Abh ängigkeit von x3.<br />
c) die kinetische Energie des Systems in Abh ängigkeit von x3.<br />
d) die Geschwindigkeit v3 der Walze (m3, R3) in Abh ängigkeit von x3.<br />
Gegeben: α, m = 1/2 m1 = 1/4 m2 = 1/16 m3,<br />
R = R1 = R2, µ = µH = µG, g<br />
a) A p<br />
ab = 2m1g sin αx3 − m3gx3<br />
b) A d ab = 2µm1g cos α x3<br />
c) Tb − Ta = 1<br />
2 m1v 2 1<br />
1 +<br />
2 Θ2ω 2 1<br />
2 +<br />
2 Θ3ω 2 1<br />
3 +<br />
2 m3v 2 3<br />
d) v3 =<br />
mit Θ2 = 1<br />
2 m2R 2 2 = 2mR 2<br />
1<br />
5 gx3(4 − sin α − µ cos α)<br />
A<br />
R2<br />
m2<br />
x3<br />
Θ3 = 1<br />
2 m3R 2 3 = 8mR 2<br />
R3<br />
m3<br />
B<br />
g