TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik ...
TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik ...
TM I,II UND ETM I,II - Lehrstuhl für Technische Mechanik ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
ERGEBNISSE<br />
<strong>TM</strong> I,<strong>II</strong> <strong>UND</strong> E<strong>TM</strong> I,<strong>II</strong><br />
<strong>Lehrstuhl</strong> <strong>für</strong> <strong>Technische</strong> <strong>Mechanik</strong>, Universität Kaiserslautern<br />
1. Aufgabe: (<strong>TM</strong>, E<strong>TM</strong>)<br />
PSfrag replacements<br />
g<br />
Prof. Dr.-Ing. P. Steinmann<br />
A B<br />
SS 2003 06.09.2003<br />
l<br />
C<br />
D<br />
l<br />
E<br />
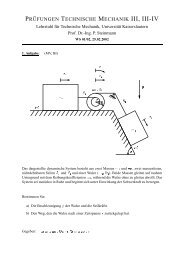
Der Balken A-B-C-D hat die gleichm äßig über seine L änge verteilte Masse M und ist in der dargestellten<br />
Weise gelagert. Das Gewicht des Rahmens ist zu vernachl ässigen.<br />
Berechnen Sie die aus dem Eigengewicht resultierenden<br />
a) Auflagerkr äfte in den Punkten E und F,<br />
b) Gelenkkr äfte in den Punkten C und D und<br />
c) Normalkraft-, Querkraft- und Momentenverl äufe des Balkens in den Bereichen von Punkt A<br />
bis Punkt C und skizzieren Sie diese.<br />
Gegeben: m, l, M = 5m<br />
a) FV = 5 mg FH = 11<br />
4 mg EH = 11<br />
4 mg<br />
b) CH = 31<br />
8 mg DH = − 9<br />
8 mg CV = 31<br />
8 mg DH = − 9<br />
8 mg.<br />
F<br />
l<br />
l<br />
l<br />
l
c)<br />
Bereich 1: 0 ≤ x1 ≤ l<br />
N(x1) = 0<br />
Q(x1) = − mg<br />
l x1<br />
M(x1) = − 1 mg<br />
2 l x21 Bereich 2: 0 ≤ x2 ≤ l<br />
N(x2) = −mg − mg<br />
l x2<br />
Q(x2) = 0<br />
M(x2) = − 1<br />
2 mgl<br />
Bereich 3: 0 ≤ x3 ≤ l<br />
N(x3) = −2mg − mg<br />
l x3<br />
Q(x3) = 11<br />
4 mg<br />
M(x3) = − 1 11<br />
mgl + mg x3<br />
2 4
2. Aufgabe: (<strong>TM</strong>, E<strong>TM</strong>)<br />
PSfrag replacements<br />
2a<br />
3a<br />
A µ0 B<br />
µ0<br />
a<br />
C<br />
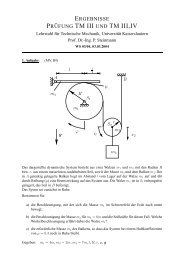
Eine homogene Walze (Masse m, Radius a) wird auf einer schiefen Ebene durch einen reibungsfrei<br />
gelenkig gelagerten homogenen Balken (Masse M, L änge 3a) gehalten. Alle Oberfl ächen sind rauh<br />
und haben den Haftreibungskoeffizient µ0.<br />
Bestimmen Sie:<br />
a) die Kr äfte in den Punkten A, B und C;<br />
b) in welchem Punkt zuerst Gleiten auftritt, wenn µ0 abnimmt;<br />
c) wie groß µ0 mindestens sein muss, damit das System im Gleichgewicht bleibt;<br />
d) wie groß µ0 ist, wenn M = 3m.<br />
Gegeben: m, M, a, α = 30 ◦<br />
3<br />
Mg + mg<br />
a) Ax = − 4 √<br />
3 + 2<br />
3<br />
Mg + mg<br />
RC = 4 √ ; NC =<br />
3 + 2<br />
3<br />
Mg + mg<br />
4<br />
α<br />
m<br />
; Ay = 1<br />
4 Mg ; NB = 3<br />
4 Mg ; RB =<br />
b) im Punkt B, weil RB = RC und NB < NC<br />
c) µ0 ≥<br />
3M + 4m<br />
3M( √ 3 + 2)<br />
d) µ0 ≥ 0, 3274<br />
M<br />
g<br />
3<br />
Mg + mg<br />
4 √<br />
3 + 2<br />
;
frag replacements<br />
3. Aufgabe: (<strong>TM</strong>)<br />
x<br />
G<br />
z<br />
a<br />
y<br />
F<br />
a<br />
C D<br />
A B<br />
a<br />
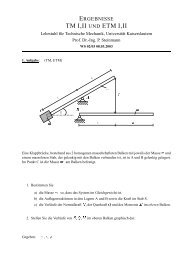
Die in der Abbildung dargestellte L–f örmige Platte sei in negative z–Richtung durch ihr Eigengewicht<br />
q = G / a 2 sowie in negative y–Richtung durch die Einzellast F belastet<br />
a) Tragen Sie die Kr äfte in den sechs Pendelst ützen so ein, dass Zugkr äfte positive Werte annehmen.<br />
b) Bestimmen Sie die Kr äfte in den sechs Pendelst ützen.<br />
c) Geben Sie den Wertebereich von F in Abh ängigkeit von G an, f ür den die Pendelst ützen in C<br />
und D durch Seile ersetzt werden k önnten.<br />
Gegeben: a , F , q = G / a 2<br />
a) Zugkr äfte in Auflagerrichtung positiv<br />
b) Ax = −3/2 G<br />
Cx = +9/2 G − F = Cz → C = +9 √ 2/2 G − √ 2 F<br />
Dx = −3 G + F = Dz → D = −3 √ 2 G + √ 2 F<br />
Az = −1/6 G − 1/3 F<br />
Bz = −7/3 G + 1/3 F<br />
By = F<br />
c) 3 G ≤ F ≤ 4.5 G<br />
a<br />
a<br />
a<br />
a
PSfrag replacements<br />
4. Aufgabe: (<strong>TM</strong>, E<strong>TM</strong>)<br />
z<br />
A B<br />
x<br />
L1<br />
L<br />
L2<br />
l<br />
C<br />
G<br />
∆Θ<br />
s<br />
∆ϑ(s)<br />
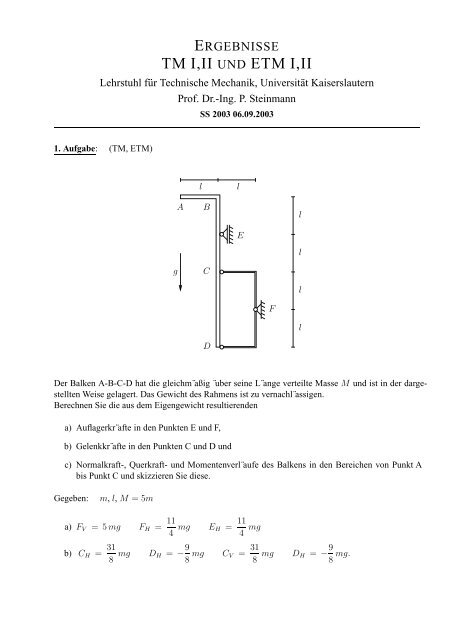
Ein gelenkig gelagerter, schubstarrer Balken (L änge L, Biegesteifigkeit EIy) ist in G gelenkig mit<br />
einem Stab (L änge l, Dehnsteifigkeit EA, Temperaturausdehnungskoeffizient α) verbunden. Der Stab<br />
wird von einem Temperaturfeld ∆ϑ(s) mit linearem Verlauf und Maximalwert ∆Θ erw ärmt.<br />
Berechnen Sie<br />
a) die Auflager- und Gelenkreaktionen in A, B, C und G,<br />
b) die Verl ängerung ∆l des Stabes.<br />
Gegeben: L, L1, L2, l, EIy, EA, α, ∆Θ.<br />
L2<br />
a) Ax = 0 Az = Gz<br />
L1<br />
Gz = 1<br />
2<br />
L 2 2<br />
3<br />
b) ∆l = α<br />
l ∆Θ<br />
2<br />
α EA ∆Θ<br />
EA L<br />
+ 1<br />
EIy l<br />
⎡<br />
⎢<br />
⎣1 −<br />
L 2 2<br />
3<br />
1<br />
EA<br />
EIy<br />
L<br />
l<br />
Bz = −Gz<br />
⎤<br />
⎥<br />
⎦<br />
+ 1<br />
L<br />
L1<br />
Cz = Gz
5. Aufgabe: (<strong>TM</strong>)<br />
PSfrag replacements<br />
a<br />
a<br />
a<br />
ˆy<br />
ˆz<br />
b c<br />
Der dargestellte d ünnwandige Querschnitt wird in z−Richtung, rechts, am oberen Flansch mit der<br />
Querkraft Qz belastet.<br />
Bestimmen Sie<br />
a) das Fl ächentr ägheitsmoment Iyy;<br />
b) den Schubfluss t infolge Querkraft. Stellen Sie den (zh)-Verlauf, den Verlauf des statischen<br />
Momentes Sy und den Schubflußverlauf graphisch dar und ermitteln sie die maximale Schub-<br />
.;<br />
spannung infolge Querkraft τ max<br />
Q<br />
c) den Schubmittelpunkt;<br />
d) die Schubspannung infolge Torsion τM sowie Ort und Betrag der maximalen Schubspannung<br />
τ max<br />
Q+M infolge Querkraft Qy und Torsion MT .<br />
Gegeben: Qz, h, a, b = 4 1 a, c = 3 3a a) Iyy = 217<br />
36 a3 h<br />
b) • Verlauf des Schubflusses t:<br />
A : t = 0 B : t = 6 Qz 66 Qz 213<br />
C : t = D : t =<br />
217 a 217 a 434<br />
• maximale Schubspannung infolge Querkraft bei D:<br />
τ max 213 Qz<br />
Q =<br />
434 ah<br />
S<br />
h<br />
z<br />
Qz<br />
y<br />
Qz<br />
a
PSfrag replacements<br />
c)<br />
PSfrag replacements<br />
zh-Linie<br />
a<br />
1<br />
2 a<br />
−<br />
D<br />
C<br />
Qz<br />
T3<br />
+<br />
−<br />
+<br />
B<br />
+<br />
yM<br />
−<br />
A<br />
T2<br />
PSfrag replacements<br />
b d<br />
T2<br />
T1<br />
T1<br />
d) Schubspannungen infolge Torsion τ max = MT<br />
h<br />
τ max<br />
M<br />
=<br />
1460<br />
651 aQzh<br />
7<br />
P<br />
= 1460 Qz<br />
≈ 0, 96Qz<br />
1519 h2 h2 IT<br />
S- / t-Verlauf<br />
D<br />
C<br />
Schubmittelpunkt<br />
yM = 559<br />
a ≈ 2, 58a<br />
217<br />
3 ah3<br />
Die maximale Schubspannung τ max<br />
Q+M tritt auf, in der Stegmitte (D), rechts. Am Punkt D ist die<br />
Schubspannung aus Querkraft, τQ, maximal. Die Schubspannungsverteilung aus Torsion, τM,<br />
ist überall im Profil gleich.<br />
τ max<br />
Q+M =<br />
<br />
0, 49 0, 96 Qz<br />
+<br />
a h h<br />
B<br />
A
6. Aufgabe: (<strong>TM</strong>, E<strong>TM</strong>)<br />
PSfrag replacements<br />
45 ◦<br />
c<br />
A B<br />
l<br />
EA2<br />
EI, EA<br />
F<br />
a<br />
ϕ<br />
x y<br />
Das dargestellte System aus einem Viertelkreisbogentr äger (Biegesteifigkeit EI, Dehnsteifigkeit EA)<br />
und einem horizontalen Stab (Dehnsteifigkeit EA2) sei in der skizzierten Weise durch die Kraft F<br />
belastet. Der Bogentr äger ist im Punkt C fest eingespannt und durch den Stab AB gegen die Wand<br />
abgest ützt.<br />
Bestimmen Sie<br />
a) die Auflagerreaktionen in C und die Stabkraft X;<br />
b) die horizontale Verschiebung des Punktes B, d.h. die L ängen änderung des Stabes;<br />
c) die horizontale Verschiebung des Punktes B, wenn kein Stab vorhanden ist.<br />
Hinweis: Energieanteile aus Querkraft sind zu vernachl ässigen.<br />
<br />
2 1 1<br />
sin xdx = x − sin 2x<br />
2 4<br />
Gegeben: F, l, a, EI, EA, EA2<br />
a) Cx = F − X, Cz = 0, MC = a(F − X)<br />
1<br />
X =<br />
1 + 4l<br />
EA2 EA2<br />
+<br />
EA EI a2<br />
F<br />
<br />
πa<br />
b) ∆l = Xl<br />
EA2<br />
lF<br />
=<br />
EA2 + 4l <br />
1 a2<br />
+ πa<br />
EA EI<br />
c) EA2 → 0 ∆l = πa<br />
<br />
1 a2<br />
+ F<br />
4 EA EI<br />
z<br />
C
7. Aufgabe: (E<strong>TM</strong>)<br />
PSfrag replacements<br />
y<br />
A<br />
x2<br />
x1<br />
ω<br />
m1, r<br />
Auf einem horizontal verschieblich gelagerten Brett (Masse m2) befindet sich eine homogene Walze<br />
(Masse m1, Raduis r). Zum Zeitpunkt t = 0 sind beide K örper in Ruhe.<br />
Die Walze dreht sich f ür t > 0 mit konstanter Winkelgeschwindigkeit ω. Zwischen Walze und Brett<br />
findet reines Rollen statt.<br />
Bestimmen Sie:<br />
a) den Gesamtimpuls des Systems f ür t > 0;<br />
b) die Geschwindigkeiten der Walze v1 und des Bretts v2 in Abh ängigkeit von ω;<br />
c) die Geschwindigkeiten von Walze und Brett f ür die Sonderf älle m2 → ∞ und m2 → 0;<br />
d) die kinetische Energie des Gesamtsystems f ür t > 0;<br />
e) den Drehimpuls des Gesamtsystems bez üglich des raumfesten Punktes A f ür t > 0.<br />
Gegeben: m1, m2, r, ω<br />
a) m1v1 + m2v2 = 0<br />
b) v1 =<br />
m2<br />
m1 + m2<br />
rω = (1 −<br />
m1<br />
m1 + m2<br />
)rω, v2 = − m1<br />
m1 + m2<br />
c) m2 → ∞ =⇒ v1 = rω, v2 = 0; m2 → 0 =⇒ v1 = 0, v2 = −rω.<br />
d) T = 1<br />
2<br />
e) L(A) =<br />
<br />
m1m2<br />
+ m1<br />
m1 + m2<br />
1<br />
2 −<br />
m2<br />
m1 + m2<br />
<br />
r 2 ω 2 .<br />
<br />
m1r 2 ω.<br />
rω.<br />
m2
8. Aufgabe: (E<strong>TM</strong>)<br />
PSfrag replacements<br />
α<br />
x1<br />
m1<br />
µ<br />
Das dargestellte System besteht aus einer Masse m1, einer im Punkt A gelagerten homogenen Walze<br />
(m2, R2) und einer zweiten homogenen Walze (m3, R3). Die Masse m1 gleitet auf einer schiefen<br />
Ebene (Winkel α) mit dem Reibkoeffizient µ und ist mittels eines dehnstarren Seils, das im Punkt B<br />
befestigt ist, mit den beiden Walzen verbunden. Das System sei zun ächst in Ruhe und beginne sich<br />
unter Einwirkung der Schwerkraft g zu bewegen. Die Massen m1, m2, m3, der Winkel alpha und der<br />
Reibkoeffizient µ seien so gew ählt, daß sich das System in positive x1-Richtung bewegt. Haft- und<br />
Gleitreibungskoeffizient seien hierbei gleich µ = µH = µG.<br />
Bestimmen Sie:<br />
a) die potentielle Energie des Systems in Abh ängigkeit von x3.<br />
b) die vom System geleistete Reibarbeit in Abh ängigkeit von x3.<br />
c) die kinetische Energie des Systems in Abh ängigkeit von x3.<br />
d) die Geschwindigkeit v3 der Walze (m3, R3) in Abh ängigkeit von x3.<br />
Gegeben: α, m = 1/2 m1 = 1/4 m2 = 1/16 m3,<br />
R = R1 = R2, µ = µH = µG, g<br />
a) A p<br />
ab = 2m1g sin αx3 − m3gx3<br />
b) A d ab = 2µm1g cos α x3<br />
c) Tb − Ta = 1<br />
2 m1v 2 1<br />
1 +<br />
2 Θ2ω 2 1<br />
2 +<br />
2 Θ3ω 2 1<br />
3 +<br />
2 m3v 2 3<br />
d) v3 =<br />
mit Θ2 = 1<br />
2 m2R 2 2 = 2mR 2<br />
1<br />
5 gx3(4 − sin α − µ cos α)<br />
A<br />
R2<br />
m2<br />
x3<br />
Θ3 = 1<br />
2 m3R 2 3 = 8mR 2<br />
R3<br />
m3<br />
B<br />
g