ERGEBNISSE TECHNISCHE MECHANIK III-IV - Lehrstuhl für ...
ERGEBNISSE TECHNISCHE MECHANIK III-IV - Lehrstuhl für ...
ERGEBNISSE TECHNISCHE MECHANIK III-IV - Lehrstuhl für ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>ERGEBNISSE</strong><br />
<strong>TECHNISCHE</strong> <strong>MECHANIK</strong> <strong>III</strong>-<strong>IV</strong><br />
<strong>Lehrstuhl</strong> <strong>für</strong> Technische Mechanik, TU Kaiserslautern<br />
1. Aufgabe: (TM <strong>III</strong>: MV, BI)<br />
y<br />
x<br />
A<br />
B<br />
SS 11, 02.08.2011<br />
C D<br />
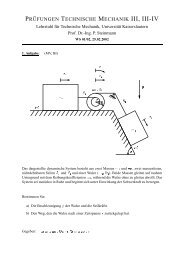
Ein Kinderfahrzeug wird durch die Vertikalbewegung der geführten Stange AB angetrieben.<br />
Diese ist mit dem momentan horizontalen Balken BCD verbunden, welcher über die Koppel<br />
DE, die Kurbel EO und somit die Hinterräder mit der konstanten Winkelgeschwindigkeit ω0<br />
antreibt.<br />
a) Skizzieren Sie in der Aufgabenstellung <strong>für</strong> die dargestellte Lage die Geschwindigkeitsvektoren<br />
in den Punkten A und E. Markieren Sie zusätzlich den Momentanpol der Koppel<br />
DE auf einem der Hilfsgitterpunkte. Lösungen die nicht auf einem Hilfsgitterpunkt<br />
liegen, werden nicht gewertet.<br />
Berechnen Sie <strong>für</strong> die dargestellte Lage:<br />
b) die GeschwindigkeitvE und die BeschleunigungaE des Punktes E;<br />
c) die Geschwindigkeit vD des Punktes D sowie die Winkelgeschwindigkeiten ωDE der<br />
KoppelDE undωBCD des Balkens BCD;<br />
d) die Winkelbeschleunigung ˙ ωDE der KoppelDE.<br />
Gegeben: r, ω0.<br />
ω0<br />
O<br />
r<br />
E<br />
r
a) Geschwindigkeitsvektoren in A undE skizzieren,<br />
Momentanpol der KoppelDE einzeichnen<br />
y<br />
z<br />
⎛ ⎞<br />
0<br />
b) vE = ⎝ω0r<br />
⎠<br />
0<br />
⎛<br />
−ω<br />
aE = ⎝<br />
2 0r ⎞<br />
0 ⎠<br />
0<br />
c) ωBCD = 3<br />
10 ω0<br />
ωDE = ω0<br />
x<br />
10<br />
vD = ω0r<br />
⎛ ⎞<br />
−3<br />
⎝ 9 ⎠<br />
10<br />
0<br />
d) ˙ωDE = − 21<br />
100 ˙ω2 0<br />
Π1<br />
A<br />
B C D<br />
ω0<br />
O<br />
r<br />
E
2. Aufgabe: (TM <strong>III</strong>: MV, BI)<br />
x<br />
000 111<br />
000 111<br />
µ<br />
m g<br />
000 111<br />
000 111 M<br />
0000000000000000<br />
1111111111111111<br />
r<br />
000 111 00000000<br />
11111111<br />
r m<br />
0000000000000000<br />
1111111111111111<br />
000 111 00000000<br />
11111111<br />
0000000000000000<br />
1111111111111111<br />
000 111 α 00000000<br />
11111111<br />
0000000000000000<br />
1111111111111111<br />
00000000000000000<br />
11111111111111111<br />
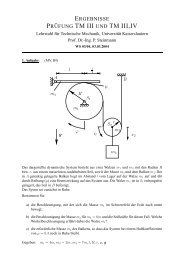
Ein dünnwandiger Hohlzylinder und ein Vollzylinder (Masse jeweils m, Radius jeweils r) liegen<br />
wie skizziert auf einer schiefen Ebene (Neigungswinkel α) und befinden sich anfangs in<br />
Ruhe. Der Reibungskoeffizient an der Berührstelle der beiden Zylinder beträgt µ und am unteren<br />
Zylinder greift wie abgebildet ein Moment M an. Ab einem bestimmten Wert M0 des<br />
Moments setzen sich die Zylinder in Bewegung und rollen die schiefe Ebene hinauf.<br />
a) Ermitteln Sie die Beschleunigung ¨x des Vollzylinders.<br />
b) Bei welchem Wert M = M0 setzen sich die Zylinder in Bewegung?<br />
Gegeben: m, r, g, α, µ, M.
a) ¨x = 2(1−µ) 4gsinα<br />
M −<br />
mr(7+µ) (7+µ)<br />
b) M0 = 2mgsinα<br />
1−µ
3. Aufgabe: (TM <strong>III</strong>: MV, BI)<br />
C<br />
m2<br />
B<br />
l l<br />
4<br />
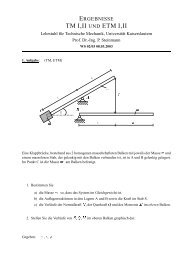
An einem inAgelenkig gelagerten masselosen horizontalen Stab ist die Punktmassem1<br />
befestigt. Durch die Drehbewegung des Stabes um den Punkt A stößt (Stoßzahl e) die Punktmasse<br />
m1 gegen einen horizontalen Balken BC der Masse m2, welcher in Punkt B gelenkig<br />
gelagert ist und im Punkt C auf einer Ebene aufliegt. Die Anfangsgeschwindigkeit der Punktmasse<br />
istv0.<br />
Bestimmen Sie:<br />
A<br />
a) die Geschwindigkeit der Punktmassem1 unmittelbar vor und unmittelbar nach dem Stoß,<br />
sowie die Winkelgeschwindigkeit des Stabes BC unmittelbar nach dem Stoß,<br />
b) den Energieverlust∆E während des Stoßes,<br />
c) die Winkelgeschwindigkeit des Stabes BC, in der skizzierten aufrechten Lage.<br />
d) Wie groß muss die Anfangsgeschwindigkeit v0 mindestens sein, damit der Stab BC die<br />
aufrechte Lage erreicht?<br />
Gegeben: m1 = 2m, m2 = m, l, v0 = √ gl, e = 3<br />
, g.<br />
4<br />
l<br />
m1<br />
g<br />
v0
a) ¯ωB = 9vA0<br />
5l<br />
¯vA = 3vA0<br />
5<br />
b) △E = mv2 A0<br />
10<br />
<br />
6 g<br />
c) ¯ωB2 =<br />
25 l<br />
<br />
25<br />
d) v0 = vA0 =<br />
27 gl
4. Aufgabe: (TM <strong>IV</strong>: MV, BI)<br />
g<br />
13a,m<br />
z<br />
A<br />
x(t)<br />
M = 4m<br />
10a<br />
ϕ<br />
13a, m<br />
m ∗ = 2m<br />
Die skizzierte Schaukel besteht aus zwei gleichen starren Stangen (jeweils Länge 13a, Masse<br />
m) und einem ebenfalls starren Balken (Länge 10a, Masse M). Die Schaukel wird durch<br />
eine Massem ∗ , die sich gemäßx(t) = ˆx sin(Ωt) auf dem Balken bewegt, angetrieben.<br />
a) Berechnen Sie <strong>für</strong> die Schaukel ohne die Antriebsmassem ∗ :<br />
– die SchwerpunktskoordinatezS,<br />
– das MassenträgheitsmomentΘA bezüglich des Lagers A.<br />
b) Ermitteln Sie die Bewegungsgleichung des Systems in der Koordinate ϕ. Linearisieren<br />
Sie die Differentialgleichung um die Gleichgewichtslageϕ = 0. Es gelte ˆx ≪ h.<br />
c) Berechnen Sie die Resonanzfrequenz Ωres des Systems.<br />
Gegeben: a, m, M = 4m, m ∗ = 2m, g, Ω.<br />
h
a) zS = 10a<br />
ΘA = 722ma 2<br />
b) 1010ma 2 +2mˆx 2 sin 2 (Ωt) ¨ϕ+84mgasinϕ = −2mgˆxsin(Ωt)cosϕ<br />
Linearisierung:<br />
¨ϕ+ 42 g<br />
505a<br />
<br />
=ω 2<br />
<br />
42 g<br />
c) Ωres = ω =<br />
505a<br />
ϕ = − 1<br />
505<br />
gˆx<br />
sin(Ωt)<br />
a2
5. Aufgabe: (TM <strong>IV</strong>: MV, BI)<br />
y<br />
x<br />
y ′<br />
Der skizzierte Wagen fährt zunächst mit konstanter Geschwindigkeit auf ebener Strecke. Als<br />
der Fahrer bemerkt, dass ein loses Gepäckstück (Masse m) die Windschutzscheibe hinunter<br />
rutscht, bremst er den Wagen mit konstanter Verzögerungaab.<br />
m<br />
x ′<br />
Wie groß darfahöchstens sein, damit das Gepäckstück nicht von der Windschutzscheibe<br />
abhebt?<br />
Gegeben: m, g, α.<br />
α<br />
g
a ≤ g<br />
tanα
6. Aufgabe: (TM <strong>IV</strong>: MV, BI)<br />
x1<br />
M, R M, R<br />
c<br />
00 11<br />
00 11<br />
x2<br />
Zwei homogene Walzen (M, R) sind durch eine Feder c miteinander verbunden. Im Schwerpunkt<br />
der zweiten Walze ist ein mathematisches Pendel (m, l) angebracht. Die Walzen rollen<br />
ohne zu gleiten.<br />
Bestimmen Sie:<br />
a) die kinetische und die potentielle Energie des Systems in Abhängigkeit der gegebenen<br />
Koordinatenx1, x2 undϕ;<br />
b) die Lagrange FunktionL;<br />
c) das Differentialgleichungsystem mit Hilfe der Lagrange Gleichungen zweiter Art;<br />
d) das linearisierte Differentialgleichungsystem <strong>für</strong> kleine Winkelausschlägeϕ;<br />
e) die Eigenfrequenz des Systems <strong>für</strong>m = 0.<br />
Gegeben: m, M, l, R, c, g.<br />
00 11<br />
00 11<br />
ϕ<br />
l<br />
m<br />
g
a) Kinetische Energie<br />
T = 3<br />
4 M ˙x 2 1 + ˙x2 2<br />
+ 1<br />
2 m ˙x 2 2 +2 ˙x2 ˙ϕlcosϕ+ ˙ϕ 2 l 2<br />
Potentiale Energie<br />
Π = 1<br />
2 c (x2 −x1) 2 +mgl(1−cosϕ)<br />
b) L = 3<br />
4 M ˙x 2 1 + ˙x2 1<br />
2 +<br />
2 m ˙x 2 2 +2 ˙x2 ˙ϕlcosϕ+ ˙ϕ 2 l 2 − 1<br />
2 c (x2 −x1) 2 −mgl(1−cosϕ)<br />
c) Bewegungsgleichungen<br />
3<br />
2 M¨x1 −c (x2 −x1) = 0<br />
<br />
3<br />
M +m ¨x2 +ml ¨ϕcosϕ−ml ˙ϕ<br />
2 2sinϕ+c (x2 −x1) = 0<br />
ml ¨x2cosϕ−ml ˙x2 ˙ϕsinϕ+m ¨ϕl 2 +mglsinϕ+m ˙x2 ˙ϕlsinϕ = 0<br />
d) Linearisierung<br />
3<br />
2 M¨x1 −c (x2 −x1) = 0<br />
<br />
3<br />
M +m ¨x2 +ml ¨ϕ+c (x2 −x1) = 0<br />
2<br />
m¨x2 +ml ¨ϕ+mgϕ = 0<br />
e) ω =<br />
4<br />
3<br />
c<br />
M