einmal anders anschaulich dargestellt
einmal anders anschaulich dargestellt
einmal anders anschaulich dargestellt

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Physikalische Grundlagen der<br />
Biomechanik<br />
Prof. Dr.-Ing. Manfred Nietert<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
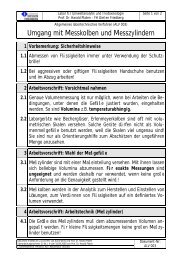
Eingeprägte Kräfte<br />
Massenkraft Federkaft Magnetkraft Druckkraft<br />
F=m g F=c s F=<br />
1 2<br />
B A F=p A<br />
2μο<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Begriff des Vektors<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Begriff des Vektors<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
F<br />
Vektor-<br />
verschie-<br />
bung<br />
Ein Vektor ist eine gerichtete Größe, die längs<br />
ihrer Wirkungsline verschoben werden kann<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.<br />
(frei nach W. Busch v. MN)
Begriff des Vektors<br />
Ein Vektor darf längs seiner Wirkungslinie<br />
verschoben werden, ohne dass sich am System<br />
etwas ändert<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Begriff des Vektors<br />
F1 ist nur betragsmäßig gleich F2 !!!<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Begriff des Vektors<br />
Ungleichheit der Vektoren, obwohl alle den<br />
gleichen Betrag haben !!<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Vektoraddition<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
E2<br />
E1<br />
Vektoraddition<br />
Wirken zwei Kräfte in<br />
verschiedenen Richtungen, muss<br />
das Ergebnis nicht 1+1=2 sein!<br />
FE1<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.<br />
F<br />
FE2<br />
FF<br />
(frei nach W.Busch v. MN)
Koordinatensystem nach ISO 10328<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Koordinatensysteme<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Vektorzerlegung<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Vektoraddition<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Freischneiden<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Kräftegleichgewicht/Spannung<br />
F1<br />
Querschnittsfläche<br />
A<br />
σ F2<br />
Zwei Kräfte sind im Gleichgewicht, wenn sie gleich groß sind und<br />
entgegengesetzt wirken. Wichtig ist aber, das Material nicht zu<br />
vergessen, an dem diese Kräfte wirken, sonst kommt es zur<br />
Zerreißprobe. (modifiziert nach W.Busch v. MN)<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Freischneiden<br />
Am „freigeschnittenen“<br />
Körper werden die<br />
Schnittreaktionen<br />
eingetragen.<br />
Die Summe der Kräfte<br />
und Momente müssen im<br />
Gleichgewicht sein.<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Freischneiden<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Drehmoment<br />
Das Drehmoment ist das Produkt aus Radiuslänge r und<br />
der senkrecht wirkenden Kraft F (frei nach W. Busch v. MN)<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.<br />
r<br />
F
Drehmoment<br />
(daher Abk.: M)<br />
Das Drehmoment ist ähnlich wie eine Kraft ein Vektor, d.h. nicht<br />
nur die Größe, sondern auch die Richtung ist wichtig!.<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg (frei nach W.Busch v. MN)<br />
Prof. Dr.-Ing. M. Nietert.
„Rechte Handregel“<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Moment<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Moment<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.<br />
=<br />
Kraft<br />
mal<br />
wirksamer Hebelarm
„Versetzmoment“<br />
Die<br />
Parallelverschiebung<br />
einer Kraft ist nur<br />
möglich, wenn<br />
gleichzeitig ein<br />
zusätzliches Moment<br />
hinzugefügt wird<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Hüftmoment<br />
Da die Kraft in Richtung<br />
des Schwerpunktes zeigt,<br />
würde das Becken absinken,<br />
bis der Bandapparat dies<br />
verhindert. Durch ein aktives<br />
Hüftmoment kann dies verhindert<br />
werden.<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Hüftmomente<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Kniegelenk<br />
Knöchel<br />
Hüftgelenk<br />
Wirkung<br />
der Vektoren<br />
Hüftexartikulationsprothese<br />
Größe u. Richtung der<br />
Vektoren in M-L-Richtung,<br />
während der Standphase<br />
Die Wirkungslinie der Kraft muss immer in<br />
dieser Phase vor dem Kniedrehpunkt liegen<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Gleichgewichts-<br />
bedingungen<br />
= 0 ΣFi<br />
ΣMi = 0<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Zentripedalkraft<br />
m v<br />
Fz = r<br />
mit<br />
Kreisbeschleunigung:<br />
m/v 2<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.<br />
2
Schwerpunkt<br />
Die Gleichgewichtslage<br />
hängt von dem<br />
Unterstützungspunkt<br />
und der Lage der am<br />
Schwerpunkt wirkenden<br />
Gewichtskraft ab<br />
(modifiziert nach Wilhelm Busch v. MN)<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
a u. b stabil<br />
F und G liegen auf einer<br />
Linie durch den Schwer-<br />
punkt<br />
Stabilität<br />
c: M dreht<br />
dreht zurück bis<br />
e=0 stabil<br />
d: : M M kippt<br />
System um<br />
e wird immer größer<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Gleichgewichtslagen<br />
Heißt nicht, „an einer Lage<br />
teilnehmen“!!<br />
______________________<br />
Einbeiniger Stand<br />
sehr ungünstig, da<br />
Schwerpunkt über<br />
Unterstützungspunkt<br />
__________________________<br />
Dreibein immer stabil,<br />
sofern Schwerpunkt<br />
zwischen den Unterstützungspunkten liegt (frei nach W. Busch v. MN)<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Standsicherheit<br />
a b c<br />
Lage des Schwerpunktes<br />
a) beide Füße werden gleich belastet<br />
b) rechter Fuß wird stärker belastet<br />
c) Person benutzt noch zusätzlich einen Stock<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Ermittlung des Schwerpunktes<br />
ΣMB = 0 = FA L - G x ⇒ x =<br />
FA L<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.<br />
G<br />
Kraftmessdose<br />
(Waage)
Kraftmessdose<br />
(Waage)<br />
Ermittlung<br />
des<br />
Schwerpunktes<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Schwerpunktslagen<br />
Jedes Körpersegment<br />
besitzt seinen eigenen<br />
Schwerpunkt<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Gesamt Gesamt-<br />
Schwerpunkt<br />
yS =<br />
Σyi S mi<br />
m<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Gesamt Gesamt-<br />
Schwerpunkt<br />
yS =<br />
Σyi S mi<br />
m<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Gesamt Gesamt-<br />
Schwerpunkt<br />
Während des<br />
Gehens wird der<br />
Schwerpunkt<br />
ständig auf- und<br />
abgehoben<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Drehzentrum<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Drehzentrum<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Drehzentrum<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Drehzentrum<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Drehzentrum<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Drehzentrum<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Drehzentrum<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Drehzentrum<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Kinematische Ketten<br />
offene Ketten<br />
geschlossene Ketten<br />
„Getriebe“ – Viergelenk“<br />
E = Momentaner Drehpol<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Momentanpol Ei (Instant Centre)<br />
Lageänderung<br />
der momentalen<br />
Drehpole<br />
E1 nach En<br />
= Polbahn<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Momentanpol<br />
Der momentane<br />
Drehpunkt im<br />
Kniegelenk liegt im<br />
Schnittpunkt der<br />
Kreuzbänder,<br />
(nach „Menschik“)<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Polkurven<br />
Bei der Kniebeugung<br />
rollt die Gangpolbahn<br />
auf der Rastpolbahn<br />
ab.<br />
Rastpolbahn ist hier<br />
fest mit dem Femur<br />
verbunden<br />
*) Untersuchungen zur Kinematik des menschlichen Kniegelenkes im<br />
Hinblick auf ihre Approximation in der Prothetik, Diss. TU Berlin 1975;<br />
The Compromise Pivot Axis of the Knee Joint, Shaker Verlag 2008<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Viergelenkgetriebe<br />
G1-G4 Gelenke<br />
1-4 Verbindungen<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Viergelenkgetriebe<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Viergelenkgetriebe<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Viergelenkgetriebe<br />
Die momentanen<br />
Drehzentren liegen im<br />
Schnittpunkt der<br />
Verlängerung der<br />
Schwingen b u. d<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Polkurven<br />
Bahnkuven<br />
„Four-Bar-Linkage“<br />
Teh-Lin<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Ersatzsystem für das Bein<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Bewegung des Unterschenkels<br />
Röntgenkinema-<br />
tografische Bewe- Bewegungsanalyse<br />
(50 Bilder/s)<br />
um den Oberschenkel<br />
Lageänderung eines im<br />
Unterschenkel befestigten<br />
Nagels relativ zum Femur<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Kompromissachse<br />
nach Nietert *)<br />
Bei einer Drehung um<br />
diese Achse verändert<br />
sich die Bewegung<br />
der Tibia gegenüber<br />
dem Femur nur<br />
unwesentlich<br />
*) Untersuchungen zur Kinematik des menschlichen Kniegelenkes<br />
im Hinblick auf ihre Approximation in der Prothetik, Diss. TU<br />
Berlin 1975; The Compromise Pivot Axis of the Knee Joint,<br />
Shaker Verlag 2008<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Kompromissachse<br />
nach Nietert *)<br />
Drehung des Unterschenkels<br />
um die Kompromissachse nach<br />
Nietert im Vergleich zur<br />
wirklichen Bewegung<br />
*) Untersuchungen zur Kinematik des menschlichen Kniegelenkes im<br />
Hinblick auf ihre Approximation in der Prothetik, Diss. TU Berlin 1975;<br />
The Compromise Pivot Axis of the Knee Joint, Shaker Verlag 2008<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Anwendung der<br />
Kompromissachse<br />
Aufbaurichtlinien<br />
für eine<br />
Bein-Prothese<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Reibung<br />
Die Reibung wirkt der<br />
Bewegung entgegen<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
o<br />
Reibung<br />
Die Größe der<br />
Reibungskraft hängt<br />
von dem<br />
Reibungskoeffizient<br />
en ab, d.h. von der<br />
Werkstoffpaarung<br />
FR=tanρο FN<br />
FR=μο FN<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Kennzeichnung von Prothesen nach den<br />
Belastungen nach ISO 10328<br />
Jedes prothetische Hilfsmittel der unteren Gliedmaßen/jede<br />
prothetische Struktur der unteren Gliedmaßen:<br />
• für das/die die Erfüllung der Anforderungen dieser<br />
Internationalen Norm bei einem bestimmten<br />
Prüfbelastungsgrad „P“ nachgewiesen ist, und<br />
• das/die für Personen mit amputierten unteren<br />
Gliedmaßen geeignet ist, deren Körpermasse einen<br />
bestimmten Wert für die maximale Körpermasse "m"<br />
kg nicht überschreitet, der in den schriftlichen<br />
Anweisungen des Herstellers zum vorgesehenen<br />
Verwendungszweck angegeben ist,<br />
sind entsprechend der festgelegten<br />
Klassifikation/Bezeichnung zu beschriften.<br />
Beispiele:<br />
Die Kennzeichnung muss am Hilfsmittel und/oder auf der<br />
Verpackung jeder Einheit angebracht werden oder<br />
gegebenenfalls an der Verkaufsverpackung. Wenn eine<br />
Einzelverpackung für jede Einheit nicht durchführbar<br />
ist, muss die Kennzeichnung im Beilagenblatt<br />
angegeben sein, das mit einem oder mehreren<br />
Hilfsmitteln geliefert wird.<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
ISO 10328<br />
Kräfte und Momente<br />
bei Fersenbelastung<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
ISO 10328<br />
Kräfte und Momente<br />
bei Zehenbelastung<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Innere Kräfte u. Momente nach<br />
Innere Kraft<br />
ISO 10328<br />
Anatomische Beschreibung Alternative Beschreibung<br />
Positive Kraft neigt zu<br />
Axialkraft F u Stauchungen des Beines in seine Längsrichtung<br />
Knöchelbeugemoment<br />
M Ao<br />
Auslösung von Dorsalflexion am<br />
Knöchelgelenk<br />
Bewegung des Knöchels zum Anheben<br />
der Zehen<br />
Knöchelbeuge- Knöchelbeuge- M MAf Auslösung von Inversion am Bewegung des Knöchels zum Anheben<br />
moment<br />
Knöchelgelenk<br />
der Fußinnenseite<br />
Kniebeugemoment M Ko Auslösung von Extension am<br />
Kniegelenk<br />
Kniebeugemoment M Kf Hervorrufen einer seitlichen<br />
Bewegung am Knie in Bezug auf<br />
Fuß und Hüfte (Adduktion am<br />
Kniegelenk)<br />
Torsionsmoment M u Hervorrufen einer inneren<br />
Drehung des distalen Endes des<br />
Beins in Bezug auf das proximale<br />
Ende<br />
Streckung des Knies<br />
Bewegung des Knies nach außen in<br />
Bezug zu Fuß und Hüfte<br />
Verdrehen des Beins, um den Vorfuß<br />
nach innen zu drehen<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Knöchel- u. Kniemomente<br />
Lastwerte für Prüfungen von<br />
Prothesen nach ISO10328<br />
Parameter<br />
Belastungsbedingung I<br />
(Fersenbelastung)<br />
Belastungsbedingung II<br />
(Zehenbelastung)<br />
P6 P5 P4 P3 P6 P5 P4 P3<br />
Prüfkraft F Fcr cr (N) 1530 1280 1180 920 1400 1150 1035 797<br />
Knöchelbeugemoment M Ao (Nm) -47,2 -39,5 -39,5 -36,1 166,8 137,0 118,0 91,0<br />
Knöchelbeugemoment M Af (Nm) -44,2 -37 -28 -21,3 30,6 25,1 25,1 20,5<br />
Kniebeugemoment M Ko (Nm) 76,7 64,2 64,2 43,0 99,6 81,8 70,0 53,6<br />
Kniebeugemoment M Kf (Nm) 73,8 61,7 54,9 50,0 48,7 40,0 40,0 34,0<br />
Axialkraft F u (N) 1475 1234 1137 884 1390 1142 1028 791<br />
Torsionsmoment M u (Nm) -0,2 -0,1 -0,8 -2,4 8,7 7,1 6,9 6,0<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Ganganalyse<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Kraftmessplatte<br />
Die Messgrößen werden in die<br />
Komponenten zerlegt, elektronisch<br />
erfasst und aufgezeichnet<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Vektoren<br />
Lage u. Größe der Bodenreaktionskräfte<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Vektoren<br />
Lage u. Größe der Bodenreaktionskräfte<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Zerlegung der Kräfte in<br />
Komponenten<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Vertikalkraft<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Ganganalyse mit<br />
Druckaufnehmern<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Druckverteilung<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Druckverteilung<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Portables Mess-System<br />
Mess System PoMeS zur<br />
Ermittlung von Kräften u. Momenten in<br />
der Prothese<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Portables Mess-<br />
System<br />
Mit Hilfe eines mit<br />
Dehnungmessstreifen (DMS)<br />
bestückten Pylons werden<br />
die Momente in der A-P-,<br />
M-L-Ebene, das<br />
Torsionsmoment und die<br />
axiale Belastung getrennt<br />
erfasst.<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Doppelschritt<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
normal gehen auf Ebene Treppe ab<br />
Treppenabsatz Treppe ab Treppe auf<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Flexwalk Hängelager, 3R15<br />
Dynamik, 3R43 Einachs, TehLin<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Trägheitsgesetz<br />
O-téé, téé, OO-téé!!<br />
téé!!<br />
Ein Körper verharrt so lange in seinem<br />
Bewegungszustand, wie keine Kraftänderung wirkt!<br />
(frei nach Asterix v. MN)<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Massenträgheitsmoment=Drehmasse<br />
Winkelbeschleunigung<br />
eines<br />
zylindrischen<br />
Körpers mit<br />
geringem<br />
Massenträgheitsmoment<br />
(frei nach W.Busch)<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Energie-Erhaltungssatz<br />
Epot + Ekin + Erot = C<br />
Gh + mv<br />
2<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.<br />
2<br />
+ Iω<br />
2<br />
2<br />
= C
Einfluss der Massenträgheit u.<br />
der Beschleunigung<br />
Massenträgheitsmoment<br />
bezüglich<br />
des Schwerpunktes<br />
.<br />
IS = Σ Δm r 2<br />
IS = Σ Δm r<br />
Falls die Drehachse<br />
um l verschoben von<br />
Schwerpunkt<br />
I = IS + m l 2 .<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Umfangsgeschwindigkeit -<br />
Oohh!! (ω!!)<br />
vae! (v)<br />
Drehimpuls<br />
r = radius<br />
v = r • ω M • t = I • ω<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Potentielle u. Kinetische Energie<br />
Epot=Gh=mgh<br />
Ekin=mv /2 2<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Impuls<br />
F<br />
F . t = m . v<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Arbeit<br />
W=∫Fds<br />
W=∫Mdα<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Arbeit<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Energiebilanz<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Impuls<br />
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
Ganganalyse<br />
Welch ein harmonisches Gangbild!<br />
Erreicht durch<br />
Schwungphasensteuerung<br />
von OB*) *)<br />
*) = os bonum ®<br />
[für Nicht-Römer = „gutes Bein“]<br />
(bis heute erfolgreiches künstliches Bein mit kosmetischer Verkleidung)<br />
_____________________________________________________________________________________<br />
modifiziert nach Asterix v. MN<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.
_____________________________________________________________________________________<br />
FH Gießen-Friedberg Prof. Dr.-Ing. M. Nietert.