Jürgen Dick - Lehrstuhl Algorithmen & Datenstrukturen, Institut für ...
Jürgen Dick - Lehrstuhl Algorithmen & Datenstrukturen, Institut für ...
Jürgen Dick - Lehrstuhl Algorithmen & Datenstrukturen, Institut für ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
]2<br />
[3<br />
[2.3<br />
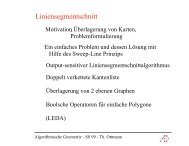
Und ich werde dann im dritten Teil die Triangulation<br />
dieser einfacheren Stücke besprechen.<br />
]2.3<br />
Also möchte ich zunächst mit dem Anwendungsproblem, das den<br />
Hintergrund <strong>für</strong> dieses ... diese heutige Vorlesung bietet,<br />
beginnen. Ich hatte bereits in der Einleitung, als es darum<br />
ging, darüber zu sprechen, was <strong>für</strong> mögliche Anwendungsgebiete<br />
es gibt, in denen algorithmische Probleme auftreten, das<br />
Art-Gallery-Problem erwähnt.<br />
[3.1<br />
[3.1.1<br />
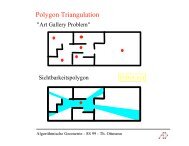
Das ist hier nochmal durch das Bild dargestellt. Dieses<br />
Art-Gallery-Problem ist als das Problem, etwa ein<br />
Museum zu überwachen, indem man dort Kameras oder von<br />
mir aus auch Personen als Wächter positioniert ... die<br />
eben das ganze Museum übersehen können.<br />
]3.1.1<br />
[3.1.2<br />
Das ist ... da stellt sich natürlich die Frage, was die<br />
minimale Anzahl von solchen Wächtern oder Kameras sein<br />
könnte und das ist ein Problem, das natürlich in dem<br />
Sinne von einer praktischen Bedeutung ist.<br />
]3.1.2<br />
[3.1.3<br />
Nun, man kann das Problem auch etwas dynamisieren. Man<br />
könnte sich auch vorstellen, man hat einen Roboter, der<br />
läuft durch dieses Gebiet - durch diese Art-Gallery - und<br />
er möchte abends sozusagen alles, wenn alle Leute bereits<br />
gegangen sind, überwachen und möglichst einen kurzen Weg<br />
in der Art-Gallery - in diesem Museum - zurücklegen, um<br />
das Ganze einsehen zu können.<br />
[3.1.3.1<br />
Nun, der ... ein solcher Roboter, wie er zu sehen ist,<br />
der sieht nur einen Ausschnitt des ganzen Geländes, das<br />
sogenannte Sichtbarkeitspolygon. Und wie sich dieses<br />
Sichtbarkeitspolygon ändert, wenn der Roboter sich durch<br />
dieses Museum bewegt, das ist zu sehen in einem Film, der<br />
hier markiert ist.<br />
]3.1.3.1<br />
[3.1.3.2<br />
Ich will diesen Film, diesen kurzen MPEG-Film mal laufen<br />
lassen ... Das ist also vielleicht ganz nett. Da sehen<br />
Sie ... ah, hier sieht man wieder, daß man also da hinein<br />
gehen muß, damit die Farben stimmen. Also hier sehen Sie,<br />
wie der Roboter so langsam das Museum einsehen kann. Dann<br />
geht er zu einer ... bewegt er sich diese Strecke hier<br />
entlang und sieht ein anderes Stück usw. Das ist also ein<br />
Beispiel da<strong>für</strong>, wie sich sozusagen aus dem Blickwinkel des<br />
107