Alfred Böge Technische Mechanik - PP99
Alfred Böge Technische Mechanik - PP99 Alfred Böge Technische Mechanik - PP99
86 2.4 Guldin’sche Regeln 2.4.1 Volumenberechnung Ein Rotationskörper entsteht durch Drehung seiner Profilfläche um seine Symmetrieachse. Bei einer Drehung „erzeugt“ die Profilfläche das Volumen des Körpers. Man kann sich vorstellen, dass jedes Flächenteilchen an der Erzeugung mit einem bestimmten Anteil beteiligt ist. Das kleine Flächenteilchen DA erzeugt das Ringvolumen DV ¼ 2px DA. Die Summe aller Teilvolumen ist das Gesamtvolumen V. Der Summenausdruck SDAx ist die Momentensumme aller Teilflächen, bezogen auf die Drehachse (siehe 2.2.1 Momentensatz für Flächen), und damit gleich dem Moment Ax0 der ganzen Profilfläche A. Daraus ergibt sich die Guldin’sche Volumenregel: Das Volumen eines Rotationskörpers ist das Produkt aus der Profilfläche und ihrem Schwerpunktsweg bei einer Umdrehung. 2.4.2 Oberflächenberechnung Oberflächen oder Mantelflächen von Rotationskörpern entstehen durch Drehung ihrer Profillinie um die Symmetrieachse. Dabei ist jedes Längenteilchen der Profillinie mit einem bestimmten Flächenanteil beteiligt. Die kleine Teillänge Dl erzeugt bei einer Drehung die Ringfläche DA ¼ 2px Dl. Die Summe aller Teilflächen ist die Mantelfläche A. Der Summenausdruck SDlx ist die Momentensumme aller Teillängen, bezogen auf die Drehachse (siehe 2.3.1 Momentensatz für Linien) und damit gleich dem Moment der ganzen Profillinie l. Daraus ergibt sich die Guldin’sche Oberflächenregel: Die Oberfläche (Mantelfläche) eines Rotationskörpers ist das Produkt aus der Länge der Profillinie und ihrem Schwerpunktsweg bei einer Umdrehung. V ¼ SDV ¼ S2px DA ¼ 2pSDAx SDAx ¼ Ax0. Setzt man Ax0 in die erste Gleichung ein, dann wird V ¼ 2pAx0. Darin ist das Produkt 2px0 der Weg, den der Schwerpunkt S der Profilfläche bei einer Umdrehung zurücklegt. V ¼ A 2px0 2 Schwerpunktslehre Volumen A Profilfläche x0 Schwerpunktsabstand der Profilfläche von der Drehachse nach 2.2.3.1 A ¼ SDA ¼ S2px Dl ¼ 2pSDlx SDlx ¼ lx0. Setzt man lx0 in die erste Gleichung ein, dann wird A ¼ 2plx0. Darin ist das Produkt 2px0 der Weg, den der Schwerpunkt S der Profillinie bei einer Umdrehung zurücklegt. Oberfläche A ¼ l 2px0 Mantelfläche l Länge der Profillinie x0 Schwerpunktsabstand der Profillinie von der Drehachse nach 2.3.3.1.
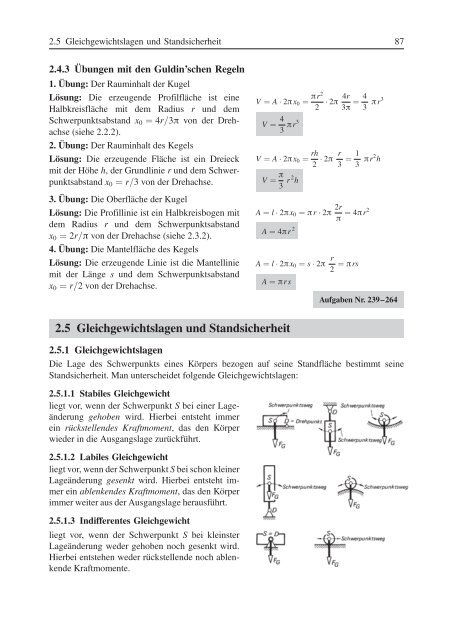
2.5 Gleichgewichtslagen und Standsicherheit 87 2.4.3 Ûbungen mit den Guldin’schen Regeln 1. Ûbung: Der Rauminhalt der Kugel Lösung: Die erzeugende Profilfläche ist eine Halbkreisfläche mit dem Radius r und dem Schwerpunktsabstand x0 ¼ 4r=3p von der Drehachse (siehe 2.2.2). 2. Ûbung: Der Rauminhalt des Kegels Lösung: Die erzeugende Fläche ist ein Dreieck mit der Höhe h, der Grundlinie r und dem Schwerpunktsabstand x0 ¼ r=3 von der Drehachse. 3. Ûbung: Die Oberfläche der Kugel Lösung: Die Profillinie ist ein Halbkreisbogen mit dem Radius r und dem Schwerpunktsabstand x0 ¼ 2r=p von der Drehachse (siehe 2.3.2). 4. Ûbung: Die Mantelfläche des Kegels Lösung: Die erzeugende Linie ist die Mantellinie mit der Länge s und dem Schwerpunktsabstand x0 ¼ r=2 von der Drehachse. V ¼ A 2px0 ¼ pr2 2 V ¼ 4 3 pr3 V ¼ A 2px0 ¼ rh 2 V ¼ p 3 r 2 h 2p 4r 4 ¼ 3p 3 pr3 r 1 2p ¼ 3 3 pr2 h A ¼ l 2px0 ¼ pr 2p 2r ¼ 4pr2 p A ¼ 4pr 2 2.5 Gleichgewichtslagen und Standsicherheit A ¼ l 2px0 ¼ s 2p r ¼ prs 2 A ¼ prs Aufgaben Nr. 239–264 2.5.1 Gleichgewichtslagen Die Lage des Schwerpunkts eines Körpers bezogen auf seine Standfläche bestimmt seine Standsicherheit. Man unterscheidet folgende Gleichgewichtslagen: 2.5.1.1 Stabiles Gleichgewicht liegt vor, wenn der Schwerpunkt S bei einer Lageänderung gehoben wird. Hierbei entsteht immer ein rückstellendes Kraftmoment, das den Körper wieder in die Ausgangslage zurückführt. 2.5.1.2 Labiles Gleichgewicht liegt vor, wenn der Schwerpunkt S bei schon kleiner Lageänderung gesenkt wird. Hierbei entsteht immer ein ablenkendes Kraftmoment, das den Körper immer weiter aus der Ausgangslage herausführt. 2.5.1.3 Indifferentes Gleichgewicht liegt vor, wenn der Schwerpunkt S bei kleinster Lageänderung weder gehoben noch gesenkt wird. Hierbei entstehen weder rückstellende noch ablenkende Kraftmomente.
- Seite 55 und 56: 1.2 Die Grundaufgaben der Statik 35
- Seite 57 und 58: 1.2 Die Grundaufgaben der Statik 37
- Seite 59 und 60: 1.2 Die Grundaufgaben der Statik 39
- Seite 61 und 62: 1.2 Die Grundaufgaben der Statik 41
- Seite 63 und 64: 1.2 Die Grundaufgaben der Statik 43
- Seite 65 und 66: 1.2 Die Grundaufgaben der Statik 45
- Seite 67 und 68: 1.2 Die Grundaufgaben der Statik 47
- Seite 69 und 70: 1.2 Die Grundaufgaben der Statik 49
- Seite 71 und 72: 1.2 Die Grundaufgaben der Statik 51
- Seite 73 und 74: 1.2 Die Grundaufgaben der Statik 53
- Seite 75 und 76: 1.2 Die Grundaufgaben der Statik 55
- Seite 77 und 78: 1.2 Die Grundaufgaben der Statik 57
- Seite 79 und 80: 1.2 Die Grundaufgaben der Statik 59
- Seite 81 und 82: 1.2 Die Grundaufgaben der Statik 61
- Seite 83 und 84: 1.2 Die Grundaufgaben der Statik 63
- Seite 85 und 86: 1.2 Die Grundaufgaben der Statik 65
- Seite 87 und 88: 1.2 Die Grundaufgaben der Statik 67
- Seite 89 und 90: 1.3 Statik der ebenen Fachwerke 69
- Seite 91 und 92: 1.3 Statik der ebenen Fachwerke 71
- Seite 93 und 94: 1.3 Statik der ebenen Fachwerke 73
- Seite 95 und 96: 1.3 Statik der ebenen Fachwerke 75
- Seite 97 und 98: 2.2 Der Flächenschwerpunkt 77 2.2
- Seite 99 und 100: 2.2 Der Flächenschwerpunkt 79 Krei
- Seite 101 und 102: 2.2 Der Flächenschwerpunkt 81 2.2.
- Seite 103 und 104: 2.3 Der Linienschwerpunkt 83 2.3 De
- Seite 105: 2.3 Der Linienschwerpunkt 85 Aus de
- Seite 109 und 110: 2.5 Gleichgewichtslagen und Standsi
- Seite 111 und 112: 3.2 Gleitreibung und Haftreibung 91
- Seite 113 und 114: 3.2 Gleitreibung und Haftreibung 93
- Seite 115 und 116: 3.2 Gleitreibung und Haftreibung 95
- Seite 117 und 118: 3.2 Gleitreibung und Haftreibung 97
- Seite 119 und 120: 3.2 Gleitreibung und Haftreibung 99
- Seite 121 und 122: 3.3 Reibung auf der schiefen Ebene
- Seite 123 und 124: 3.3 Reibung auf der schiefen Ebene
- Seite 125 und 126: 3.3 Reibung auf der schiefen Ebene
- Seite 127 und 128: 3.3 Reibung auf der schiefen Ebene
- Seite 129 und 130: 3.3 Reibung auf der schiefen Ebene
- Seite 131 und 132: 3.3 Reibung auf der schiefen Ebene
- Seite 133 und 134: 3.3 Reibung auf der schiefen Ebene
- Seite 135 und 136: 3.4 Reibung an Maschinenteilen 115
- Seite 137 und 138: 3.4 Reibung an Maschinenteilen 117
- Seite 139 und 140: 3.4 Reibung an Maschinenteilen 119
- Seite 141 und 142: 3.4 Reibung an Maschinenteilen 121
- Seite 143 und 144: 3.4 Reibung an Maschinenteilen 123
- Seite 145 und 146: 3.4 Reibung an Maschinenteilen 125
- Seite 147 und 148: 3.4 Reibung an Maschinenteilen 127
- Seite 149 und 150: 3.4 Reibung an Maschinenteilen 129
- Seite 151 und 152: 3.4 Reibung an Maschinenteilen 131
- Seite 153 und 154: 3.4 Reibung an Maschinenteilen 133
- Seite 155 und 156: 3.4 Reibung an Maschinenteilen 135
2.5 Gleichgewichtslagen und Standsicherheit 87<br />
2.4.3 Ûbungen mit den Guldin’schen Regeln<br />
1. Ûbung: Der Rauminhalt der Kugel<br />
Lösung: Die erzeugende Profilfläche ist eine<br />
Halbkreisfläche mit dem Radius r und dem<br />
Schwerpunktsabstand x0 ¼ 4r=3p von der Drehachse<br />
(siehe 2.2.2).<br />
2. Ûbung: Der Rauminhalt des Kegels<br />
Lösung: Die erzeugende Fläche ist ein Dreieck<br />
mit der Höhe h, der Grundlinie r und dem Schwerpunktsabstand<br />
x0 ¼ r=3 von der Drehachse.<br />
3. Ûbung: Die Oberfläche der Kugel<br />
Lösung: Die Profillinie ist ein Halbkreisbogen mit<br />
dem Radius r und dem Schwerpunktsabstand<br />
x0 ¼ 2r=p von der Drehachse (siehe 2.3.2).<br />
4. Ûbung: Die Mantelfläche des Kegels<br />
Lösung: Die erzeugende Linie ist die Mantellinie<br />
mit der Länge s und dem Schwerpunktsabstand<br />
x0 ¼ r=2 von der Drehachse.<br />
V ¼ A 2px0 ¼ pr2<br />
2<br />
V ¼ 4<br />
3 pr3<br />
V ¼ A 2px0 ¼ rh<br />
2<br />
V ¼ p<br />
3 r 2 h<br />
2p 4r 4<br />
¼<br />
3p 3 pr3<br />
r 1<br />
2p ¼<br />
3 3 pr2 h<br />
A ¼ l 2px0 ¼ pr 2p 2r<br />
¼ 4pr2<br />
p<br />
A ¼ 4pr 2<br />
2.5 Gleichgewichtslagen und Standsicherheit<br />
A ¼ l 2px0 ¼ s 2p r<br />
¼ prs<br />
2<br />
A ¼ prs<br />
Aufgaben Nr. 239–264<br />
2.5.1 Gleichgewichtslagen<br />
Die Lage des Schwerpunkts eines Körpers bezogen auf seine Standfläche bestimmt seine<br />
Standsicherheit. Man unterscheidet folgende Gleichgewichtslagen:<br />
2.5.1.1 Stabiles Gleichgewicht<br />
liegt vor, wenn der Schwerpunkt S bei einer Lageänderung<br />
gehoben wird. Hierbei entsteht immer<br />
ein rückstellendes Kraftmoment, das den Körper<br />
wieder in die Ausgangslage zurückführt.<br />
2.5.1.2 Labiles Gleichgewicht<br />
liegt vor, wenn der Schwerpunkt S bei schon kleiner<br />
Lageänderung gesenkt wird. Hierbei entsteht immer<br />
ein ablenkendes Kraftmoment, das den Körper<br />
immer weiter aus der Ausgangslage herausführt.<br />
2.5.1.3 Indifferentes Gleichgewicht<br />
liegt vor, wenn der Schwerpunkt S bei kleinster<br />
Lageänderung weder gehoben noch gesenkt wird.<br />
Hierbei entstehen weder rückstellende noch ablenkende<br />
Kraftmomente.


