Systembeschreibung XCx 300/500/540 - Schleicher Electronic
Systembeschreibung XCx 300/500/540 - Schleicher Electronic
Systembeschreibung XCx 300/500/540 - Schleicher Electronic

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
die Struktur der <strong>XCx</strong><br />
Betriebssystem<br />
Unter dem Echtzeit-Multitask-Betriebssystem VxWorks laufen<br />
die SPS- und CNC-Runtime sowie der optionale Webserver.<br />
Die Projektierung der SPS erfolgt mit dem Windows-<br />
Programmiersystem Multiprog, Inbetriebnahme und<br />
Bedienung von CNC und SPS mit dem Programm<br />
<strong>Schleicher</strong>-Dialog.<br />
Mehr zu Betriebs- und Programmiersystemen auf Seite 41.<br />
Koppelspeicher<br />
Ein besonderes Highlight der <strong>XCx</strong> ist die direkte Kopplung<br />
der CNC-Funktionen und der SPS nach IEC 61131-3 – eine<br />
auf dem Markt praktisch einmalige Lösung. Das SPS- und<br />
das CNC-System arbeiten zum Datenaustausch synchron<br />
auf einen Koppelspeicher, wobei die SPS eine Masterfunktion<br />
übernehmen kann. Im Multitask-Betriebssystem ist die SPS-<br />
Task 6 mit der Interpolationstask der CNC-Steuerung synchronisiert.<br />
Die Zykluszeit der Task 6 richtet sich dann nach<br />
dem IPO-Takt der CNC.<br />
Die Koppelspeicherdaten sind Variablen gemäß IEC 61131-3,<br />
die bei der Projektierung in Multiprog als globale Variablen<br />
deklariert werden. Sie sind standardmäßig dem OPC-Server<br />
zugänglich und werden z.B. im <strong>Schleicher</strong>-Dialog angezeigt.<br />
Die enge Verbindung des CNC- mit dem SPS-System ermöglicht<br />
die Realisierung von komplexen Funktionsabläufen, die<br />
mit getrennten CNC- und SPS-Steuerungen undenkbar<br />
wären. So kann die SPS auch mit der Lageregelung synchronisiert<br />
werden und Sensorsignale im Lageregeltakt wirksam<br />
werden lassen. Damit lassen sich hochdynamische, sensorgeführte<br />
CNC-Funktionen aufbauen:<br />
• Ventilsteuerung abhängig von der Bahnbewegung<br />
• Positionserfassung bei Interruptsignal<br />
• Schweißstrom entsprechend der Bahngeschwindigkeit<br />
Insbesondere ergibt sich hieraus die Möglichkeit für den<br />
Maschinenbauer, alle CNC-Aktionen eines Endanwenders<br />
durch ein SPS-Anwenderprogramm vor der Ausführung zu<br />
überprüfen und gegebenenfalls Fehlermeldungen oder<br />
Warnhinweise zu aktivieren.<br />
Beispiel: Thermische Verlagerung<br />
Um die durch betriebsbedingte Wärmedehnung verursachte<br />
Positionsverschiebung zu kompensieren, wird an den entscheidenden<br />
Stellen die Temperatur gemessen. Die SPS<br />
berechnet daraus Korrekturwerte und sendet sie an die CNC,<br />
die sie in ihre Interpolation einrechnet.<br />
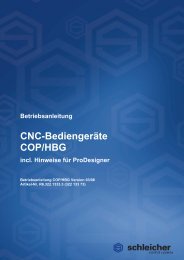
Multitask<br />
Mit einem Echtzeit-<br />
Multitask-Betriebssystems<br />
wird die<br />
Rechenleistung der SPS<br />
prioritätsgesteuert<br />
optimal für jede<br />
Aufgabe eingesetzt. Eine<br />
Task besteht aus<br />
Programmbausteinen<br />
und bekommt genauso<br />
viel Zeit zugewiesen, wie sie zu ihrer Abarbeitung benötigt.<br />
Damit wird keine wertvolle Leistung in unnötigen Wartezyklen<br />
verschenkt. Darüberhinaus werden den Tasks unterschiedliche<br />
Prioritätsstufen zugeordnet, die die Reihenfolge<br />
der Bearbeitung gemäß ihrer Wichtigkeit sicherstellen:<br />
• Überwachungstask (supervisor task level)<br />
ermittelt Fehler (Division durch Null, Zeitüberschreitung<br />
etc.) und aktiviert die entsprechende Betriebssystemtask.<br />
• Anwender- und Defaulttask (user task level)<br />
• Zyklische Tasks führen die ihnen zugewiesenen Programme<br />
innerhalb eines definierten Zeitintervalls mit<br />
vorgegebener Priorität aus. Die Task mit der höchsten<br />
Priorität wird als erste aufgerufen.<br />
• Ereignistasks werden vom Betriebssystem der <strong>XCx</strong><br />
gestartet, wenn bestimmte Ereignisse wie z.B. Interruptsignal,<br />
CANopen- oder IPO-Task auftreten.<br />
• Defaulttask wird dann aktiviert, wenn alle höherprioren<br />
Anwendertasks abgearbeitet wurden.<br />
• Betriebssystemtasks (system task level)<br />
wie Kommunikation, Debugging, Speicherverwaltung und<br />
Systemkontrolle laufen vom Anwender unbeeinflusst ab.<br />
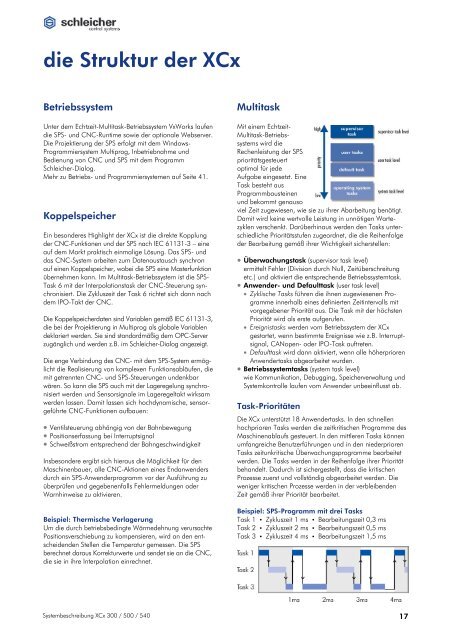
Task-Prioritäten<br />
Die <strong>XCx</strong> unterstützt 18 Anwendertasks. In den schnellen<br />
hochprioren Tasks werden die zeitkritischen Programme des<br />
Maschinenablaufs gesteuert. In den mittleren Tasks können<br />
umfangreiche Benutzerführungen und in den niederprioren<br />
Tasks zeitunkritische Überwachungsprogramme bearbeitet<br />
werden. Die Tasks werden in der Reihenfolge ihrer Priorität<br />
behandelt. Dadurch ist sichergestellt, dass die kritischen<br />
Prozesse zuerst und vollständig abgearbeitet werden. Die<br />
weniger kritischen Prozesse werden in der verbleibenden<br />
Zeit gemäß ihrer Priorität bearbeitet.<br />
Beispiel: SPS-Programm mit drei Tasks<br />
Task 1 • Zykluszeit 1 ms • Bearbeitungszeit 0,3 ms<br />
Task 2 • Zykluszeit 2 ms • Bearbeitungszeit 0,5 ms<br />
Task 3 • Zykluszeit 4 ms • Bearbeitungszeit 1,5 ms<br />
<strong>Systembeschreibung</strong> <strong>XCx</strong> <strong>300</strong> / <strong>500</strong> / <strong>540</strong> 17