Physikalische Optimierung - Physik - Universität Regensburg
Physikalische Optimierung - Physik - Universität Regensburg
Physikalische Optimierung - Physik - Universität Regensburg

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Einführung in die<br />
<strong><strong>Physik</strong>alische</strong> <strong>Optimierung</strong><br />
verfasst von<br />
Markus Zizler<br />
Mai 2007<br />
Fakultät für <strong>Physik</strong><br />
<strong>Universität</strong> <strong>Regensburg</strong><br />
Prof. Dr. Ingo Morgenstern
Inhaltsverzeichnis<br />
1 Grundlagen der Spinglasphysik 2<br />
1.1 Magnetismus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3<br />
1.2 Theoretische/Experimentelle Ergebnisse . . . . . . . . . . . . . . . . . . 4<br />
1.2.1 RKKY-Wechselwirkung . . . . . . . . . . . . . . . . . . . . . . . 4<br />
1.2.2 Frustration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6<br />
1.2.3 Phasenübergang . . . . . . . . . . . . . . . . . . . . . . . . . . . 7<br />
1.2.4 Suszeptibilität, Wärmekapaziät, Magnetisierung . . . . . . . . . 7<br />
1.3 Mathematische Spinglasmodelle . . . . . . . . . . . . . . . . . . . . . . . 10<br />
1.3.1 Ising Modell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10<br />
1.3.2 Heisenberg Modell . . . . . . . . . . . . . . . . . . . . . . . . . . 11<br />
1.3.3 XY-Modell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12<br />
1.3.4 Edward-Anderson Modell . . . . . . . . . . . . . . . . . . . . . . 12<br />
1.3.5 ±J-Modell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13<br />
2 Monte-Carlo-Methoden 14<br />
2.1 Statistische <strong>Physik</strong> . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14<br />
2.2 Simple Sampling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16<br />
2.3 Importance Sampling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17<br />
3 <strong><strong>Physik</strong>alische</strong> <strong>Optimierung</strong>salgorithmen 20<br />
3.1 Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20<br />
3.1.1 Nebenbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . 21<br />
3.1.2 Konfigurations- und Lösungsraum . . . . . . . . . . . . . . . . . 22<br />
3.1.3 Move und Nachbarschaft . . . . . . . . . . . . . . . . . . . . . . . 22<br />
3.2 Energielandschaft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22<br />
3.3 Algorithmen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24<br />
3.3.1 Random Walk und Greedy . . . . . . . . . . . . . . . . . . . . . 24<br />
3.3.2 Simulated Annealing - SA . . . . . . . . . . . . . . . . . . . . . . 25<br />
3.3.3 Threshold Accepting - TA . . . . . . . . . . . . . . . . . . . . . . 26<br />
3.3.4 Great Deluge Algorithm - GDA . . . . . . . . . . . . . . . . . . . 28<br />
3.4 Sonstiges . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29<br />
Literatur 32<br />
1
Kapitel 1<br />
Grundlagen der Spinglasphysik<br />
Die Geschichte der <strong>Physik</strong> war bis Anfang der 70er dadurch gekennzeichnet, dass<br />
man sich auf geordnete Systeme konzentrierte. Ungeordnete Systeme wurden fast<br />
vollständig vernachlässigt. Man untersuchte ideale Strukturen (z.B. perfekte Kristalle),<br />
weil man dazu leichter Theorien zur Beschreibung der physikalischen Eigenschaften<br />
entwickeln konnte. Da solch ideale Strukturen in der Realität kaum vorkommen und<br />
im Labor nur bedingt herstellbar sind, hat man begonnen, auch ungeordnete Systeme<br />
zu erforschen.<br />
So untersuchte man etwa die Auswirkungen von Verunreinigungen auf die physikalischen<br />
Eigenschaften von Kristallen. Dazu wurden in geringer Konzentration magnetische<br />
Atome in ein nicht-magnetisches Wirtsmaterial eingebracht, um die magnetische<br />
Wechselwirkung (WW) zu untersuchen. Beispielsweise kann man Eisenatome in einem<br />
Goldkristall betrachten (Au1−xFex, x: Konzentration). Bei einer Eisenkonzentration<br />
im Goldkristall zwischen 1% und 12% wurde das in diesem Kapitel erklärte, charakteristische<br />
Verhalten von Spingläsern beobachtet. Die abstrakten Ursachen für dieses<br />
Verhalten sind auch in ökonomischen Systemen zu finden; daher haben Spingläser eine<br />
große Bedeutung bei der <strong>Optimierung</strong> diverser ökonomischer Problemstellungen.<br />
Das Wort Spinglas hängt einerseits zusammen mit dem sog. Spin aus der Quantenmechanik,<br />
der für magnetische Effekte verantwortlich ist. Zum anderen weist der<br />
Begriff Glas auf ein ungeordnetes System hin: Gewöhnliches Fensterglas etwa zeigt<br />
keine geordnete Kristallstruktur wie z.B. Diamant; die Atome sind unregelmäßig angeordnet.<br />
Die Eigenschaften von Spingläsern beruhen auf Konkurrenz und Zufälligkeit<br />
der magnetischen Wechselwirkungen. Um das Phänomen der Spinglasphase besser zu<br />
verstehen, werden zunächst einige Grundlagen zu den Systembestandteilen erläutert.<br />
Anschließend werden experimentelle Ergebnisse von Untersuchungen an Spingläsern<br />
und die grundlegenden Effekte der Systemdynamik beschrieben. Den Abschluß dieses<br />
Kapitels bilden mehrere Modellierungsvarianten für Spingläser, die für Computer-<br />
Simulationen entwickelt wurden; die Simulationen bilden dann den Ausgangspunkt für<br />
die physikalischen <strong>Optimierung</strong>sverfahren.<br />
2
KAPITEL 1. GRUNDLAGEN DER SPINGLASPHYSIK 3<br />
1.1 Magnetismus<br />
Die einfachste Theorie des Magnetismus geht davon aus, dass sich bestimmte Atome<br />
wie Stabmagneten verhalten. Sie erzeugen einerseits Magnetfelder, andererseits werden<br />
sie auch von äußeren Magnetfeldern beeinflußt; die Atome wechselwirken also miteinander.<br />
Richtung und Stärke der magnetischen Effekte lassen sich durch das sog.<br />
magnetische Moment oder den Spin beschreiben; der Spin wird erzeugt durch die<br />
geladenen Teilchen aus denen ein Atom zusammengesetzt ist. Bringt man nun ein Material<br />
mit magnetischen Atomen in ein äußeres Magnetfeld, so werden sich die Spins in<br />
einer bestimmten Richtung orientieren. In einigen Stoffen können auch starke interne<br />
Effekte zu einer solchen Ausrichtung führen.<br />
Bei einem dieser internen Effekte drehen sich alle Spins in die gleiche Richtung. Diese<br />
Orientierung ist insbesondere für die starken magnetischen Eigenschaften von Eisen<br />
verantwortlich; den Effekt bezeichnet man daher als Ferro-Magnetismus. Er wird<br />
bewirkt durch die Austausch-WW der Metallatome, die durch den Überlapp der Elektronenhüllen<br />
unmittelbar benachbarter magnetischer Atome hervorgerufen wird. Ein<br />
Abbildung 1.1: Schematische Darstellung eines Ferromagneten<br />
anderer interner Effekt ist der Anti-Ferromagnetismus: Die Spins sind hier antiparallel<br />
ausgerichtet, d.h. benachbarte Spins richten sich jeweils in die entgegengesetzte<br />
Richtung aus. Der Grund hierfür liegt wiederum in dem speziellen Überlapp der Elektronenhüllen.<br />
Die magnetische Gesamtenergie eines Ferromagneten hat genau dann ein<br />
Abbildung 1.2: Schematische Darstellung eines Anti-Ferromagneten<br />
Minimum, wenn alle Spins in die gleiche Richtung zeigen. Man muß also Energie aufwenden,<br />
um einen Spin in die entgegengesetzte Richtung zu klappen. Durch Zufuhr von<br />
Wärme-Energie wird die Ordnung des Systems beeinflußt. Übersteigt die Temperatur<br />
den Curie-Punkt, so ändert sich die Richtung der einzelnen Spins aufgrund der ther-
KAPITEL 1. GRUNDLAGEN DER SPINGLASPHYSIK 4<br />
mischen Bewegung. Die ferro-magnetische Ordnung des Systems verschwindet und das<br />
Material wird paramagnetisch. Man spricht bei dieser radikalen Änderung der Stoffeigenschaften,<br />
die hauptsächlich von magnetischem Verhalten geprägt sind, von einem<br />
Phasenübergang. Die Spins sind statistisch in alle Richtungen verteilt; die Magnetisierung<br />
des Systems verschwindet. Spingläser zeichnen sich nun dadurch aus, dass<br />
Abbildung 1.3: Schematische Darstellung eines Paramagneten<br />
sie sowohl ferromagnetische als auch anti-ferromagnetische WWen besitzen, die miteinander<br />
konkurrieren [St93]. Es handelt sich dabei um eine neue Art der magnetischen<br />
Ordnung. Das Spinglasverhalten wurde mittlerweile in einer Vielzahl von Metallen,<br />
Halbleitern und Isolatoren gefunden.<br />
1.2 Theoretische/Experimentelle Ergebnisse<br />
1.2.1 RKKY-Wechselwirkung<br />
Der Spinglaszustand unterscheidet sich intrinsisch von herkömmlichen magnetischen<br />
Systemen. Bekannte Beispiele für metallische Spingläser sind Kupfer mit einer Manganbeimischung<br />
(CuxMn1−x) und mit Eisen verunreinigtes Gold (Au1−xFex). Ein<br />
häufig untersuchtes, isolierendes Spinglas ist Europiumsulfid (EuS), das mit nichtmagnetischen<br />
Strontium-Ionen (Sr) magnetisch verdünnt ist (EuxSr1−xS); EuS selbst<br />
ist ferromagnetisch. Es existieren jedoch zwei miteinander konkurrierende WWen: die<br />
negative Kopplung zwischen benachbarten Eu-Ionen und die positive Kopplung zwischen<br />
übernächsten Nachbarn, die dem Betrag nach halb so groß ist. Neben der Temperatur<br />
bestimmt dann vor allem die Konzentration x das magnetische Verhalten.<br />
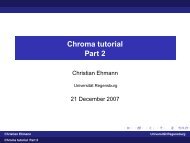
Die Abbildung 1.4 zeigt ein Phasendiagramm mit einem direkten Übergang von<br />
der paramagnetischen Phase in die Spinglas-Phase, und zwar bei einer Konzentration<br />
x der Eu 2+ -Ionen zwischen 13% und 51%. Je nach Mischungsparameter x und Temperatur<br />
T findet man eine ferromagnetische Phase (FM), eine paramagnetische Phase<br />
(PM) und eine Spinglas-Phase (SG). Für x-Werte zwischen 51% und 65% kommt es bei<br />
Erniedrigung der Temperatur zunächst zu einem Übergang von der paramagnetischen<br />
in die ferromagnetische Phase. Infolge der konkurrierenden WW ist die ferromagnetische<br />
Ordnung dabei zwar stark gestört, die Ausbildung des Spinglas-Zustandes tritt<br />
aber erst bei tieferen Temperaturen ein [Ko93].<br />
Eine theoretische Erklärung für das Entstehen der positiven und negativen magnetischen<br />
Kopplungen liefert die RKKY-WW, benannt nach Rudermann, Kittel, Kasuya
KAPITEL 1. GRUNDLAGEN DER SPINGLASPHYSIK 5<br />
Abbildung 1.4: Magnetisches Phasendiagramm von EuxSr1−xS<br />
und Yosida. Diese Austausch-WW beruht auf einer ”Polarisation” der Leitungselektronen<br />
durch die magnetischen Momente der Atome. Diese Polarisation ist eine Ausrichtung<br />
des Spins der Leitungselektronen; alle geladenen Teilchen, und damit auch die<br />
Elektronen, besitzen ein solches magnetisches Moment. Die polarisierten Leitungselektronen<br />
wiederum beeinflussen die magnetischen Momente der Atome, und so kommt es<br />
zu einer WW zwischen den Atomen selbst. Für die Stärke der Kopplung Jij gilt:<br />
Jij ∝<br />
cos(2kF · rij) <br />
r3 ij<br />
(1.1)<br />
Dabei ist kF der Fermi-Wellenvektor. Für positive Werte Jij(r) ist die WW ferromagnetisch,<br />
für negative Werte ist sie antiferromagnetisch. Die RKKY-WW hat eine lange<br />
Reichweite über mehrere Atome hinweg und zeigt oszillatorisches Verhalten, d.h. je nach<br />
Abstand der Atome kommt es zu einer ferromagnetischen oder anti-ferromagnetischen<br />
Kopplung der Spins (Abb. 1.5). Es handelt sich also um eine konkurrierende WW,<br />
die bei einer statistischen Verteilung der Atome im Kristall zur Ausbildung von Spinglaseffekten<br />
führen kann. Das Atom mit nicht verschwindendem magnetischen Moment<br />
sitzt im Mittelpunkt von konzentrischen Kugelschalen abnehmender WW-stärke (Abbildung<br />
2.6). Ferro- und antiferromagnetisches Verhalten wechselt von Schale zu Schale;<br />
die Stärke der jeweiligen WW nimmt mit zunehmendem Radius ab.
KAPITEL 1. GRUNDLAGEN DER SPINGLASPHYSIK 6<br />
Ein Spinglas kann entstehen, wenn Atome und Leitungselektronen wechselwirken.<br />
Die Elektronen übertragen die WW zwischen den Atomen, deren Spins unter dem<br />
Einfluß anderer Atome und der umgebenden Elektronen umklappen können.<br />
Abbildung 1.5: Schematischer Plot der abstandsabhängigen RKKY-WW.<br />
1.2.2 Frustration<br />
In einem Spinglas wird damit etwa die eine Hälfte der Atompaare ferromagnetisch,<br />
die andere Hälfte antiferromagnetisch wechselwirken. Aufgrund dieses dualen Verhaltens<br />
ist es möglich, dass ein Atom seinen Spin nicht so orientieren kann, dass seine<br />
WWen mit allen anderen magnetischen Atomen abgesättigt werden. Zur Beschreibung<br />
dieses Effekts kann man sich beispielsweise eine Plaquette von vier magnetischen Atomen<br />
in gleichem Abstand voneinander vorstellen (Abbildung 1.6). Die WWen sind<br />
betragsmäßig gleich, je nach Atompaar aber positiv oder negativ. Bei einer ungeraden<br />
Zahl von positiven (negativen) Kopplungen in der Plaquette können nun nicht<br />
alle WWen gleichzeitig abgesättigt werden. Jede denkbare Anordnung der Spins wird<br />
zumindest eine der Kopplungen nicht befriedigen, das System ist frustriert.<br />
Aus diesem Frustrationseffekt ergibt sich unmittelbar, dass es für solche Systeme<br />
mehrere tiefliegende Energiezustände geben kann, d.h. verschiedene Anordnungen der<br />
Spins mit gleicher minimaler Energie; man spricht in diesem Zusammenhang von Entartung<br />
der Energiezustände. Solche Effekte sind auch charakteristisch für kombinatorische<br />
<strong>Optimierung</strong>sprobleme; durch die Interpretation der Kosten als Energie erhält<br />
man mehrere gleichwertige Systemzustände.
KAPITEL 1. GRUNDLAGEN DER SPINGLASPHYSIK 7<br />
Abbildung 1.6: Schematische Darstellung der Frustration: -J bedeutet eine antiferromagnetische<br />
und +J eine ferromagnetische WW der Spins<br />
1.2.3 Phasenübergang<br />
Durch die Entartung der niedrigsten Energieniveaus stellt sich die Frage, ob das Spinglas<br />
ein neuer Zustand der Materie ist, oder ob es sich nur um einen äußerst trägen<br />
Paramagneten handelt. Bei einem wirklichen Phasenübergang hält der Endzustand eine<br />
charakteristische Ordnung aufrecht, solange die Temperatur unverändert bleibt. Das<br />
Spinglas könnte eine deutlich abgegrenzte Phase sein, deren magnetische Ordnung bei<br />
tiefen Temperaturen erhalten bleibt.<br />
Es könnte sich beim Spinglas aber auch um einen Paramagneten handeln, dessen<br />
dynamisches Verhalten soweit verlangsamt ist, dass es sich nur scheinbar um eine statische<br />
Phase handelt. Könnte man beobachten, dass ein oder mehrere Spins ihre Orientierung<br />
bei tiefen Temperaturen ändern, dann wäre das ein Beweis für paramagnetisches<br />
Verhalten. Dazu müsste man das Spinglas aber über einen sehr langen Zeitraum beobachten.<br />
1.2.4 Suszeptibilität, Wärmekapaziät, Magnetisierung<br />
Im Labor kann man allerdings nach Hinweisen auf einen Phasenübergang suchen, der<br />
sich durch eine plötzliche Änderung der magnetischen und thermodynamischen Eigenschaften<br />
des Spinglases bei einer kritischen Temperatur äußert. Diese Spinglas-Phase<br />
zeigt sich in vielen Experimenten, z.B. bei Messungen der Wechselfeldsuszeptibilität<br />
χac. Sie gibt Aufschluß über die Reaktion des Spinsystems auf ein sehr schwaches,<br />
äußeres magnetisches Wechselfeld.<br />
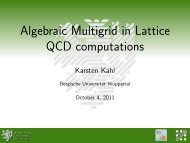
Abbildung 1.7 zeigt, dass χac eine sehr scharfe Spitze bei der Einfriertemperatur<br />
Tf hat. Dieser Peak wird aber schon durch kleine Zusatzfelder abgerundet; außerdem ist
KAPITEL 1. GRUNDLAGEN DER SPINGLASPHYSIK 8<br />
Abbildung 1.7: Magnetische Wechselfeldsuszeptibilität von EuxSr1−xS<br />
er abhängig von der Frequenz und von der Konzentration der verwendeten Materialien.<br />
Bei Spingläsern findet man also bei einer Temperatur Tf eine Spitze in der Suszeptibilität<br />
χ, was auf einen Phasenübergang hindeutet. Die Wärmekapazität C hingegen<br />
hat ein breites Maximum bei einer Temperatur, die über Tf liegt. Was geschieht also<br />
bei der Temperatur Tf ?<br />
Man vermutete zunächst einen Phasenübergang in eine antiferromagnetische Ordnung.<br />
Eine plötzlich auftretende Ordnung müßte sich jedoch in der spezifischen Wärme<br />
zeigen. Dem widerspricht aber die Tatsache, dass die spezifischen Wärme bei Tf streng<br />
monoton ansteigt und erst oberhalb von Tf ein breites Maximum ausbildet. Zudem<br />
zeigen Neutronen-Streuexperimente, dass sich keine periodische Ordnung bildet. Man<br />
sieht also weder eine homogene Magnetisierung, noch eine antiferromagnetische Struktur.<br />
Eine weitere wichtige Eigenschaft ist der Einfluß der Beobachtungszeit auf die Einfriertemperatur<br />
der Spingläser. Beobachtet man EuxSr1−xS sehr lange, so kann sich<br />
Tf um 20 % ändern. Dies zeigt, dass ein Spinglas nie zur Ruhe kommt. Es beinhaltet<br />
ein sehr großes Spektrum von Relaxationszeiten, von der mikroskopischen Zeit 10 −12 s,<br />
der Umklappzeit eines einzelnen Spins, bis hin zu vielen Jahren. Dieses Verhalten findet<br />
man auch bei anderen ungeordneten Systemen, wie z.B. Gläsern, Polymeren oder<br />
Keramiken. Unterhalb von Tf gibt es viele, in etwa gleichwertige Spinkonfigurationen.<br />
Die experimentelle Durchführung bestimmt die eingenommenen Zustände.<br />
Um den Mechanismus der langsamen Reaktion von Spingläsern auf Felder oder<br />
andere Störungen zu verstehen, wurden Messungen der Magnetisierung gemacht. Im<br />
thermischen Gleichgewicht ist die mittlere Magnetisierung M = 0. Kühlt man die Pro-
KAPITEL 1. GRUNDLAGEN DER SPINGLASPHYSIK 9<br />
Abbildung 1.8: Wärmekapazität und Suszeptibilität für verschiedene Magnetfeldstärken<br />
be ohne magnetisches Feld ab (Zero Field Cooling), schaltet man dann ein äußeres<br />
Feld ein und kurz danach wieder aus, dann bleibt die Probe magnetisiert (IRM). Das<br />
gleiche passiert, wenn man die Probe in einem Magnetfeld abkühlt (Field Cooling)<br />
und erst nach dem Abkühlen das Feld abschaltet (TRM). Die Magnetisierung klingt<br />
nur sehr langsam wieder ab. Diese remanente Magnetisierung hängt ab von dem<br />
vorher angelegten Feld, der Temperatur, der Anschaltzeit und der Abkühlrate. Ihre<br />
Existenz zeigt, dass das Spinglas viele stabile Zustände hat. Das ist wohl der wichtigste<br />
Unterschied zwischen den ungeordneten Materialien und den reinen Kristallen. Die remanente<br />
Magnetisierung ist in Abbildung 1.9 links dargestellt; die Computersimulation<br />
rechts davon macht die gute Übereinstimmung zwischen Experiment und theoretischen<br />
Modellen deutlich.<br />
Überblick<br />
Die aufgezählten Phänomene werden mit den Frustrationseffekten im Spinglas verständlich.<br />
Bei der Vielzahl von Materialien mit spinglasähnlichem Verhalten zeigt sich, dass<br />
vor allem zwei Effekte entscheidend sind: Unordnung und Konkurrenz der positiven<br />
und negativen Kopplungen. Dadurch entsteht die Frustration, die eine hochgradige<br />
energetische Entartung des Systems bewirkt. Um nun die Eigenschaften von Spingläsern<br />
verstehen zu können, wurden vereinfachte Modelle entwickelt, die sich auf die wesentlichen<br />
Mechanismen konzentrieren. Auf diese Weise erhält man ein stark idealisiertes<br />
Bild von einem Spinglas, das aber trotzdem alle entscheidenden physikalischen Aspekte<br />
beinhaltet.
KAPITEL 1. GRUNDLAGEN DER SPINGLASPHYSIK 10<br />
Abbildung 1.9: Remanente Magnetisierung für eine AuFe-Legierung(links) und eine<br />
Computersimulation(rechts)<br />
1.3 Mathematische Spinglasmodelle<br />
Die theoretische Beschreibung von Phasenübergängen ist mit großen Schwierigkeiten<br />
verbunden. <strong>Physik</strong>alisch und mathematisch exakte Modelle sind meist nur mit einem<br />
großen numerischen Aufwand zu bewältigen. Deshalb wurden vereinfachende Modelle<br />
entwickelt, die sich auf die wesentlichen physikalischen Eigenschaften der Materialien<br />
beschränken. Vereinfachungen sind aber nur dann zulässig, wenn die charakteristischen<br />
physikalischen Eigenschaften des Spinglases nicht verändert werden.<br />
Man versucht also abstrakte Modelle zu entwickeln, die zwar möglichst einfach sind,<br />
den physikalischen Inhalt jedoch nicht verlieren. Die Verifikation dieser Modelle erfolgt<br />
dann durch Vergleich der theoretischen Ergebnisse aus den Simulationen mit dem Experiment.<br />
1.3.1 Ising Modell<br />
Spingläser lassen sich mathematisch vereinfacht im Ising-Modell darstellen. Dabei betrachtet<br />
man N Plätze in einem 1-, 2- oder 3-dimensionalen Gitter, wobei jedem Gitterpunkt<br />
i ein Spin si zugeordnet ist. In diesem Modell hat jeder Spin nur zwei Einstellungsmöglichkeiten:<br />
si = +1 für Spin nach oben und si = −1 für Spin nach unten.<br />
Aus den Einstellungsmöglichkeiten der Spins folgt dann, dass es bei N Spins 2 N<br />
Zustände im Phasenraum Γ geben kann. Jede Konfiguration σ ∈ Γ des Gitters läßt<br />
sich eindeutig durch den Satz von Variablen σ = s1,s2,... ,sN bestimmen. Folgende<br />
Hamilton-Funktion H beschreibt magnetische Systeme im Ising-Modell, wobei die<br />
Notation 〈i,j〉 bedeutet, daß nur über unmittelbar benachbarte Spinpaare summiert
KAPITEL 1. GRUNDLAGEN DER SPINGLASPHYSIK 11<br />
wird.<br />
H = − <br />
〈i,j〉<br />
Jijsisj − 1<br />
gSµBB0<br />
Hierbei ist: Jij:Austausch-WW zwischen den Spins si und sj<br />
B0:externes Magnetfeld<br />
gS: Lande-Faktor<br />
µB:Bohrsches Magneton<br />
: Plancksches Wirkungsquantum<br />
N<br />
i=1<br />
si<br />
(1.2)<br />
Meist werden die auftretenden Konstanten gS, µB und gleich 1 gesetzt. Man wählt<br />
dann B0 so, dass das magnetische Moment pro Spin 1 ist. Es ergibt sich:<br />
H = − <br />
N<br />
Jijsisj − B0 si<br />
〈i,j〉<br />
i=1<br />
(1.3)<br />
Der erste Term beschreibt die Summe der Austauschenergien je zweier Spins si und<br />
sj. Der B0 enthaltende Term berücksichtigt die WW der Spins mit einem externen<br />
Magnetfeld. Die WW versucht alle Spins gleich auszurichten. Ist die Austausch-WW<br />
positiv, dann sind die Spins im Grundzustand parallel orientiert; es ergibt sich eine ferromagnetische<br />
Spinstruktur. Bei einer negativen Kopplung Jij erhält man i.Allg. eine<br />
antiferromagnetische Spinstruktur. Das Ising-Modell wurde für den eindimensionalen<br />
Fall mit Jij = J für nächste Nachbarn (J=0 sonst) von Ising selbst im Jahre 1925 exakt<br />
analytisch gelöst. Onsager konnte 1944 - ohne äußeres Magnetfeld - den zweidimensionalen<br />
Fall analytisch behandeln, Yang 1952 mit B0 = 0. Es gibt jedoch keine analytische<br />
Lösung für das 3-dimensionale Ising Modell. Die Kopplungskonstanten Jij sind im Allgemeinen<br />
theoretisch nur sehr schlecht abzuschätzen. Es ist deshalb zweckmäßig, sie als<br />
Parameter aufzufassen, die den experimentellen Ergebnissen angepaßt werden.<br />
1.3.2 Heisenberg Modell<br />
Heisenberg entwickelte 1928 auf der von Ising geschaffenen Basis ein verbessertes 3-dim.<br />
Modell. Dieses Modell konnte von den zu diesem Zeitpunkt großen Weiterentwicklungen<br />
der Quantenmechanik profitieren. Für isotrope Ferromagneten gilt der Hamiltonian:<br />
H = − <br />
Jijsi · sj − Bz<br />
〈i,j〉<br />
N<br />
i=1<br />
s z i<br />
(1.4)<br />
Dabei ist Jij=±J und außerdem gilt |si| = 1 und |sj| = 1. Im Unterschied zum Ising<br />
Modell werden hier die Spins als Vektoren betrachtet, die im Raum eine beliebige<br />
Richtung einnehmen können. Das Heisenberg-Modell ist sehr allgemein formuliert und<br />
enthält das Ising-Modell als 1-dim. Spezialfall.
KAPITEL 1. GRUNDLAGEN DER SPINGLASPHYSIK 12<br />
1.3.3 XY-Modell<br />
Beim XY-Modell handelt es sich um den 2-dim. Fall des Heisenberg-Modells. Sein<br />
Hamiltonian lautet:<br />
H = − <br />
〈i,j〉<br />
Jij(s x i sx j<br />
+ sy<br />
Man kann si als sinΦi<br />
cos Φi<br />
i sy<br />
j<br />
darstellen und daher mit dem Additionstheorem<br />
schreiben:<br />
) − Bx<br />
N<br />
i=1<br />
s x i<br />
(1.5)<br />
wobei gilt: (s x i 2 + s y2<br />
i ) = 1 (1.6)<br />
<br />
sin(Φi) · sin(Φj) + cos(Φi) · cos(Φj) = cos(Φi − Φj) (1.7)<br />
H = − <br />
N<br />
Jij cos(Φi − Φj) − B cos(Φi) (1.8)<br />
〈i,j〉<br />
Φi,Φj sind die Phasen der Spins; Φi −Φj ist deren Phasendifferenz. Der Spin kann sich<br />
in diesem Modell in der xy-Ebene drehen und behält dabei seinen konstanten Betrag<br />
von 1 bei.<br />
1.3.4 Edward-Anderson Modell<br />
Dieses Modell ist am besten untersucht und beruht ebenfalls auf dem Hamiltonian des<br />
Ising-Modells. Die Spins sitzen dabei an den Ecken eines kubischen, 3-dimensionalen<br />
Gitters; es handelt sich um Ising-Spins, die nur zwei Einstellmöglichkeiten haben. Die<br />
Reichweite der WW ist auf die jeweils nächsten Nachbarn beschränkt.<br />
Die grundlegenden Merkmale der Unordnung und Konkurrenz werden über eine<br />
geeignete, statistische Verteilung P(Jij) der Kopplungen eingeführt. Die Stärke der<br />
Kopplung Jij hängt wie bei der RKKY-WW vom Abstand der Spins ab, verschwindet<br />
jedoch beim EA-Modell bereits bei den übernächsten Nachbarn. Die Verteilung P(Jij)<br />
der Jij entspricht dabei einer Gaußverteilung mit der Standardabweichung ∆ und dem<br />
Erwartungswert Null:<br />
i=1<br />
P(Jij) = 1<br />
<br />
√ exp −<br />
2π∆ J2 ij<br />
2∆2 <br />
(1.9)<br />
Im EA-Modell wird die site-disorder, also die räumlich zufällige Verteilung der<br />
magnetischen Atome mit RKKY-WW, durch eine statistische Verteilung der Kopplungskonstanten<br />
Jij (bond-disorder) ersetzt. Die ferro- und antiferromagnetischen<br />
WW sind jedoch gleichverteilt.<br />
Mit diesem Modell ist es nun möglich, die grundlegende physikalische Fragestellung<br />
nach dem Grundzustand des Systems zu untersuchen: wie müssen sich die einzelnen
KAPITEL 1. GRUNDLAGEN DER SPINGLASPHYSIK 13<br />
Spins orientieren, damit sich das Spinglas in einem Zustand minimaler Energie befindet?<br />
Diese Suche nach dem Grundzustand wird aber durch Frustrationseffekte erschwert. Da<br />
die Gesamtenergie von der Anzahl der nicht-abgesättigten Bindungen abhängt, lautet<br />
die konkrete Aufgabe: wähle aus der Menge aller möglichen Spineinstellungen diejenige<br />
aus, bei der möglichst viele Bindungen abgesättigt werden.<br />
1.3.5 ±J-Modell<br />
Toulouse et al. fanden heraus, dass das Verhalten von Spingläsern hauptsächlich durch<br />
Frustrationseffekte und damit durch das Vorzeichen von Jij gekennzeichnet ist. Sie entwickelten<br />
das sog. ±J-Modell. Auch hierbei sind nur die WWen zwischen den nächsten<br />
Nachbarn berücksichtigt. Die Stärke der Austausch-WW Jij ist mit 50%iger Wahrscheinlichkeit<br />
jeweils +J und -J. Der Hamilton-Operator kann somit dargestellt werden<br />
als:<br />
H = − <br />
〈i,j〉<br />
Jijsisj − B0<br />
<br />
i<br />
si<br />
(1.10)<br />
Obwohl dies eine sehr starke Abstraktion von den komplizierten physikalischen Gegebenheiten<br />
darstellt, enthält dieses Modell doch die wesentlichen Eigenschaften der<br />
Spingläser. Insbesondere zeigen sich Phänomene wie das Einfrieren des Systems in ungeordneten<br />
Grundzuständen.
Kapitel 2<br />
Monte-Carlo-Methoden<br />
2.1 Statistische <strong>Physik</strong><br />
In der klassischen <strong>Physik</strong> können mit Hilfe der Newtonschen Bewegungsgleichungen<br />
Probleme mit begrenzter Teilchenzahl exakt beschrieben werden. Kennt man zu einem<br />
bestimmten Zeitpunkt t0 alle physikalischen Größen, die den Zustand des Systems<br />
bestimmen, so läßt sich der Systemzustand zu allen späteren Zeitpunkten t eindeutig<br />
vorhersagen.<br />
Bei komplizierten Vielteilchensystemen ist das jedoch nicht mehr möglich; man<br />
geht dann dazu über, mit statistischen Größen zu rechnen. Die Auswertung der statistischen<br />
Mittelwerte ermöglicht dann Aussagen über das makroskopische Verhalten<br />
des Systems. Aufgrund der großen Anzahl von Konfigurationen kommen auch bei der<br />
physikalischen <strong>Optimierung</strong> die Methoden der statistischen <strong>Physik</strong> zum Einsatz.<br />
Die in diesem Zusammenhang betrachteten Systeme können im Allgemeinen als kanonische<br />
Ensembles aufgefasst werden. Das sind abgeschlossene Systeme, die sich in<br />
thermischem Kontakt mit einem umgebenden Wärmebad befinden. Dabei kann Energie<br />
ausgetauscht werden, jedoch keine Teilchen. Befindet sich ein solches System im thermischen<br />
Gleichgewicht - d.h. die Temperatur T des Systems ist gleich der Temperatur<br />
des Wärmereservoirs - dann kann die Wahrscheinlichkeitsverteilung eines beliebigen<br />
Zustands durch die Boltzmann-Verteilung [No02]<br />
Pequ(σ) = 1<br />
Z exp<br />
<br />
− H(σ)<br />
<br />
(2.1)<br />
kBT<br />
beschrieben werden. Dabei ist kB die Boltzmann-Konstante und Z die Zustandssumme,<br />
die in der statistischen <strong>Physik</strong> eine zentrale Rolle spielt und bei der Berechnung<br />
vieler Größen als Normierungsfaktor auftritt. Die Zustandssumme ist gegeben durch:<br />
Z = <br />
exp(−βH(σ)) (2.2)<br />
σ∈Γ<br />
wobei H die Hamiltonfunktion und β = 1<br />
kBT ist. Den Mittelwert oder thermischen<br />
Erwartungswert einer Observablen A eines diskreten Systems berechnet man sodann<br />
14
KAPITEL 2. MONTE-CARLO-METHODEN 15<br />
folgendermaßen:<br />
〈A〉 = <br />
<br />
σ∈Γ<br />
A(σ)Pequ(σ) =<br />
σ∈Γ<br />
A(σ)exp<br />
<br />
− H(σ)<br />
<br />
kBT<br />
<br />
σ∈Γ exp<br />
(2.3)<br />
− H(σ)<br />
kBT<br />
Für A = H erhält man den Erwartungswert des Hamiltonians. Dieser läßt sich auch<br />
über die logarithmische Ableitung der Zustandssumme ausdrücken:<br />
− ∂ 1 ∂<br />
lnZ = −<br />
∂β Z ∂β exp(−βH(σ))<br />
=<br />
1<br />
Z<br />
σ∈Γ<br />
<br />
H(σ)exp(−βH(σ))<br />
σ∈Γ<br />
Daraus läßt sich die Wärmekapazität ableiten:<br />
C = d〈H〉<br />
dT<br />
=<br />
=<br />
=<br />
1<br />
kBT 2<br />
⎡<br />
⎣ 1<br />
Z<br />
σ∈Γ<br />
= 〈H〉 (2.4)<br />
<br />
H 2 <br />
⎤<br />
2<br />
1 <br />
(σ)exp(−βH(σ)) − H(σ)exp(−βH(σ)) ⎦<br />
Z<br />
1<br />
kBT 2<br />
2 2<br />
〈H 〉 − 〈H〉 <br />
1<br />
kBT 2V ar(H) (2.5)<br />
Aus dem Zusammenhang der Wärmekapazität mit der Varianz V ar(H) ergibt sich auch<br />
die Bedeutung dieser Größe für die Simulation: betrachtet man C(T), so sieht man, in<br />
welchem Temperaturbereich sich die größten Umordnungen ergeben. Dabei muß sich<br />
das System bei jeder Temperatur im thermischen Gleichgewicht befinden, sonst wäre<br />
die Boltzmann-Verteilung nicht verwendbar. Das Gleichgewicht stellt sich allerdings<br />
erst nach Einschwingvorgängen ein, was auch bei der Simulation berücksichtigt werden<br />
muß.<br />
Systeme im thermischen Gleichgewicht werden in der Statistischen <strong>Physik</strong> numerisch<br />
mit Hilfe von Monte-Carlo-Methoden untersucht. Damit bezeichnet man allgemein<br />
Algorithmen, die Zufallszahlen verwenden, um Mittelwerte in statistischen Systemen<br />
zu berechnen. Wie lassen sich aber nun die theoretisch hergeleiteten Observablen<br />
konkret berechnen? Bei einer exakten Berechnung müßte man über sämtliche Zustände<br />
summieren, die das System annehmen kann. In der Praxis ist es jedoch schwierig, alle<br />
möglichen Konfigurationen zu berücksichtigen.<br />
Daher macht man folgendes: die thermischen Erwartungswerte werden unter Verwendung<br />
einer nur begrenzten Anzahl von Konfigurationen bestimmt, und zwar so,<br />
dass sie den tatsächlichen Werten möglichst nahe kommen. Zwei Verfahren wurden in<br />
diesem Zusammenhang entwickelt, das Simple Sampling und das Importance Sampling.<br />
σ∈Γ
KAPITEL 2. MONTE-CARLO-METHODEN 16<br />
2.2 Simple Sampling<br />
Die grundlegende Idee des Simple Samplings [BH02] ist es, die exakten Gleichungen für<br />
thermodynamische Erwartungswerte durch eine Summe zu ersetzen, in der nicht über<br />
alle möglichen Zustände σ1,... ,σG summiert wird. Stattdessen summiert man über<br />
eine statistische Auswahl charakteristischer Punkte σ1,...,σM, M ≤ G, des Phasenraums.<br />
Als Erwartungswert erhält man also für eine Observable:<br />
Ā =<br />
M<br />
i=1 A(σi)Pequ(σi)<br />
M<br />
i=1 Pequ(σi)<br />
(2.6)<br />
Die Punkte σi werden dabei zufällig aus dem gesamten Phasenraum ausgewählt. Im<br />
Grenzfall gilt:<br />
lim Ā(σ) = 〈A(σ)〉 (2.7)<br />
M→G<br />
Da die einzelnen Konfigurationen mittels gleichverteilter Zufallszahlen bestimmt werden,<br />
wird dieses Verfahren Simple Sampling genannt. In der Praxis liefert diese Methode<br />
nur für sehr kleine Systeme oder bei sehr hohen Temperaturen gute Ergebnisse, da die<br />
Punkte des Phasenraums gleichmäßig ausgewählt werden.<br />
Die Verteilungsfunktion einer makroskopischen Variablen ist jedoch stark um ihren<br />
Mittelwert zentriert. Deshalb trägt bei jeder Temperatur nur ein sehr kleines Gebiet des<br />
Phasenraums signifikant zum thermischen Mittelwert einer Observablen bei. Betrachtet<br />
man die Verteilungsfunktion PT(E) der Variablen E so sieht man, dass diese bei der<br />
Temperatur T einen Peak bei ET mit einer Halbwertsbreite proportional zu 1<br />
√ N hat.<br />
N ist dabei die Zahl der Freiheitsgrade. Außerhalb von kritischen Temperaturbereichen<br />
verhält sich die Verteilung dann nach [BH02]:<br />
<br />
PT(E) ∝ exp −N (E − 〈E〉T ) 2<br />
2CT 2<br />
<br />
(2.8)<br />
Mit sinkender Temperatur nimmt ET ab und damit ändert sich auch die Verteilung.<br />
Das zufällige Herausgreifen von Lösungen aus dem Phasenraum beim Simple<br />
Sampling richtet sich jedoch nicht nach der Verteilung bei niedrigen Temperaturen,<br />
sondern entspricht der Wahrscheinlichkeitsverteilung P∞(E), also derjenigen, die für<br />
unendlich hohe Temperaturen gilt.<br />
Die linke Kurve von Abb. 2.1 beschreibt die Verteilung der Energie im kanonischen<br />
Ensemble bei tiefen Temperaturen. Die rechte Kurve zeigt die durch Simple Sampling<br />
erzeugte Verteilung entsprechend einer unendlich hohen Temperatur mit 〈H〉 = 0.<br />
Die Verteilung PT(E) ist bei den Energien, die im physikalischen Modell bei tiefen<br />
Temperaturen mit hoher Wahrscheinlichkeit auftreten und für das Systemverhalten in<br />
diesem Bereich wichtig sind, wegen des exponentiellen Abfalls nur sehr schmal. Beim<br />
Simple Sampling werden daher bei tiefen Temperaturen fast ausschließlich physikalisch<br />
unwichtige Konfigurationen erzeugt. Daraus ergibt sich eine stark fehlerhafte Berechnung<br />
der physikalischen Größen. Diese Nachteile können jedoch mit dem Importance-<br />
Sampling von Metropolis vermieden werden.
KAPITEL 2. MONTE-CARLO-METHODEN 17<br />
Abbildung 2.1: Wahrscheinlichkeitsverteilung der Energie E<br />
2.3 Importance Sampling<br />
Wie beim Simple Sampling wird auch hier eine Auswahl σ1,... ,σM aller möglichen<br />
Zustände σ1,... ,σG betrachtet. Die Punkte σ1,...,σM werden aber nicht gleichmäßig,<br />
sondern mit einer bestimmten Wahrscheinlichkeit P(σi) ausgewählt. Für die Observablen<br />
folgt dann:<br />
Ā =<br />
M i=1 A(σi)Pequ(σi)/P(σi)<br />
M i=1 Pequ(σi)/P(σi)<br />
= 1<br />
M<br />
M<br />
A(σi) (2.9)<br />
D.h. der Mittelwert der Observablen A(σ) soll dem arithmetischen Mittel entsprechen.<br />
Diese Methode heißt Importance Sampling.<br />
Metropolis et al. forderten, aufeinanderfolgende Zustände σi nicht unabhängig voneinander<br />
zu generieren; vielmehr soll ein Zustand σi+1 aus einem vorhergehenden Zustand<br />
σi mittels einer geeigneten Übergangswahrscheinlichkeit W(σi → σi+1) erzeugt<br />
werden. Man spricht von einem sog. Markov-Prozess. Die Übergangswahrscheinlichkeit<br />
soll dabei so gewählt werden, dass für lim(M → G) die Verteilungsfunktion der<br />
Zustände P(σi) der Gleichgewichtsverteilung Pequ(σ) entspricht. Eine wichtige, aber<br />
i.Allg. nicht notwendige Bedingung hierfür ist das Prinzip von Detailed Balance:<br />
Pequ(σi)W(σi → σi ′) = Pequ(σi ′)W(σi ′ → σi) (2.10)<br />
Wenn man Gl. 2.1 in Gl. 2.10 einsetzt und umstellt, sieht man, dass die Rate der Übergangswahrscheinlichkeit<br />
nur von der Energieänderung ∆H = H(σi ′) − H(σi) abhängt:<br />
W(σi → σi ′)<br />
<br />
= exp −<br />
W(σi ′ → σi) ∆H<br />
<br />
(2.11)<br />
kBT<br />
i=1
KAPITEL 2. MONTE-CARLO-METHODEN 18<br />
Durch diese Gleichung ist die Übergangswahrscheinlichkeit W(σi → σi ′) jedoch noch<br />
nicht vollständig bestimmt. Meist wählt man:<br />
<br />
1 ∆H<br />
W(σi → σi ′) = 1 − tanh<br />
2 2kBT<br />
<br />
exp −<br />
=<br />
∆H<br />
<br />
kBT<br />
<br />
1 + exp − ∆H<br />
(2.12)<br />
kBT<br />
Oder alternativ:<br />
W(σi → σi ′) =<br />
<br />
<br />
exp − ∆H<br />
<br />
kBT : für ∆H > 0<br />
1 : sonst<br />
(2.13)<br />
Gleichung 2.12 zeigt die Glauber-Funktion, Gl. 2.13 die Metropolis-Funktion. Es<br />
wird also eine Folge von Zuständen σi → σi ′ → σi ′′ mit diesen Übergangswahrscheinlichkeiten<br />
erzeugt. Es bleibt zu zeigen, dass die daraus resultierende Wahrscheinlichkeitsverteilung<br />
P(σi) gegen Pequ(σi) konvergiert. Dies kann mit Hilfe des Zentralen<br />
Grenzwertsatzes der Wahrscheinlichkeitstheorie gezeigt werden; für den vollständigen<br />
Beweis wird auf die einschlägige Literatur verwiesen.<br />
Simulation des ±J-Modells<br />
Im Folgenden wird erläutert, wie sich das ±J-Modell mit Hilfe des Single-Spin-Flip<br />
Algorithmus simulieren läßt. Dazu sei ein Gitter der Größe L×L×L mit periodischen<br />
Randbedingungen gegeben. Jeder Gitterplatz i ist durch einen Spin si besetzt; die<br />
Anfangskonfiguration ist beliebig. Die WW Jij zwischen zwei benachbarten Spins wird<br />
zufällig mit +J oder -J vorbesetzt und bleibt in der Simulation konstant. Man geht nun<br />
folgendermaßen vor:<br />
1. Auswahl eines Gitterpunktes i mit Spin si.<br />
2. Berechnung der Energieänderung, wenn sich der Spin von si nach -si dreht.<br />
3. Berechnung der Übergangswahrscheinlichkeit W für diesen Spinflip.<br />
4. Auswahl einer Zufallszahl Z zwischen Null und Eins mit dem Zufallszahlengenerator.<br />
5. Drehung des Spins für Z
KAPITEL 2. MONTE-CARLO-METHODEN 19<br />
die Erwartungswerte nur von Zeit zu Zeit berechnet werden. Dies läßt sich so interpretieren,<br />
dass die anfänglichen Zustände kein thermisches Gleichgewicht darstellen.<br />
So müssen zunächst einmal viele neue Konfigurationen erzeugt werden bis das System<br />
im thermischen Gleichgewicht ist, und dann die einzelnen Grössen gemessen werden<br />
können
Kapitel 3<br />
<strong><strong>Physik</strong>alische</strong><br />
<strong>Optimierung</strong>salgorithmen<br />
3.1 Grundlagen<br />
Grundsätzlich kann ein <strong>Optimierung</strong>sproblem wie folgt beschrieben werden [DD91]:<br />
Maximiere (oder minimiere) K= H(x) unter den Nebenbedingungen<br />
gi(x)<br />
⎧<br />
⎨<br />
⎩<br />
≤ 0<br />
= 0 mit i=1,. . .,n und x∈Γ<br />
≥ 0<br />
(3.1)<br />
Dabei ist H(x) die Ziel- oder Kostenfunktion, die maximiert werden soll. Sie ist eine<br />
Abbildung aus der Menge der zulässigen Lösungen (Konfigurationen) x, dem sogenannten<br />
Lösungsraum (Konfigurationsraum) Γ, in die Menge der reellen Zahlen:<br />
H : Γ −→ R<br />
σ −→ H(x) (3.2)<br />
Da bei den zu behandelnden Problemen die Gesamtkosten des Systems minimiert werden<br />
sollen, betrachtet man i.Allg. nur Minimierungsprobleme. Ein Maximierungsproblem<br />
kann durch Multiplikation der Zielfunktion mit dem Faktor -1 erzeugt werden.<br />
20
KAPITEL 3. PHYSIKALISCHE OPTIMIERUNGSALGORITHMEN 21<br />
Ein kombinatorisches <strong>Optimierung</strong>sproblem lautet wie ein <strong>Optimierung</strong>sproblem<br />
[Iba87]: Minimiere H(σ) unter der Bedingung<br />
⎧<br />
⎨ ≤ 0<br />
gi(σ) = 0 mit i=1, ...,n und σ ∈Γ (3.3)<br />
⎩<br />
≥ 0<br />
H(σ) ist wiederum als Zielfunktion eine Abbildung aus der Menge der zulässigen Lösungen<br />
σ in die reellen Zahlen, wobei Γ diesmal endlich oder abzählbar unendlich groß ist<br />
und aus diskreten Elementen besteht:<br />
H : Γ −→ R<br />
σ −→ H(σ) (3.4)<br />
Des Weiteren gibt es noch kontinuierliche <strong>Optimierung</strong>sprobleme. In diesem Fall<br />
ist der Konfigurationsraum Γ nicht diskret.<br />
3.1.1 Nebenbedingungen<br />
Eine häufig auftretende Schwierigkeit bei kombinatorischen <strong>Optimierung</strong>sproblemen<br />
sind die Nebenbedingungen. Grundsätzlich gibt es 2 Möglichkeiten deren Einhaltung<br />
zu erreichen:<br />
Die erste Möglichkeit besteht darin, Lösungen zu verbieten, die die Nebenbedingungen<br />
nicht einhalten. Dabei zerfällt der Suchraum aber in kleine Inseln, die das dort<br />
gestrandete System nicht wieder verlassen kann; das Optimum wird damit verfehlt,<br />
sofern nicht zufällig gerade diese Insel das Optimum darstellt.<br />
Zweitens kann man dem Problem dadurch begegnen, dass man eine Verletzung der<br />
Nebenbedingungen prinzipiell zulässt, die Nichteinhaltung aber in Form von virtuellen<br />
Kosten, sog. Penalties bestraft. Eine Penalty-Funktion HP ist eine Abbildung<br />
mit σ ∈Γ und<br />
HP(σ) = λ · g(σ)<br />
HP : Γ −→ R+<br />
σ −→ HP(σ) (3.5)<br />
= 0 σ erfüllt Nebenbedingung<br />
> 0 sonst<br />
(3.6)<br />
λ∈R ist dabei ein noch festzulegender Parameter. Für jede Nebenbedingung lässt sich<br />
so eine Funktion definieren, die als Zusatzterm in die Zielfunktion aufgenommen wird.<br />
Durch die Wahl der λ kann man nun die Einhaltung der Nebenbedingungen mehr oder<br />
weniger stark fordern.<br />
Eine zulässige Lösung liegt dann vor, wenn alle Nebenbedingungen eingehalten<br />
werden. Man kann dabei zwischen harten und weichen Penalties unterscheiden. Bei<br />
den harten Penalties müssen die Nebenbedingungen in jedem Fall eingehalten werden;<br />
weiche Penalties lassen auch leichte Verletzungen der Nebenbedingungen als gültige<br />
Lösung zu. Zum Beispiel kann man bei einem Tourenplanungsproblem mit mehreren<br />
Lastwagen eine kleine Überladung einzelner LKWs zulassen.
KAPITEL 3. PHYSIKALISCHE OPTIMIERUNGSALGORITHMEN 22<br />
3.1.2 Konfigurations- und Lösungsraum<br />
Eine Konfiguration ist eine mögliche Lösung des Problems, die aber nicht notwendigerweise<br />
alle Nebenbedingungen einhalten muß. Sie stellt ein Element des Konfigurationsraums<br />
dar.<br />
Die Menge aller Konfigurationen bildet den Konfigurationsraum. Aufgrund der<br />
vielen Freiheitsgrade des Systems spricht man von einem hochdimensionalen Raum.<br />
Die Menge umfaßt auch Elemente, die ein Problem nicht lösen, weil sie die Nebenbedingungen<br />
nicht erfüllen.<br />
Als Lösungsraum bezeichnet man die Menge aller zulässigen Kombinationen der<br />
festzulegenden Systemparameter. Jedes Element der Menge löst das Problem und genügt<br />
den Nebenbedingungen. Der Lösungsraum ist ein Unterraum des Konfigurationsraums;<br />
seine Elemente unterscheiden sich lediglich in deren Qualität.<br />
3.1.3 Move und Nachbarschaft<br />
Ein wichtiger Grundbegriff für die <strong>Optimierung</strong> ist der sog. (elementare) Move<br />
[Nu93]. Das ist eine Abbildung d aus einer Untermenge des Konfigurationsraums Γd in<br />
den Konfigurationsraum Γ:<br />
d : Γd −→ Γ<br />
σ −→ d(σ) (3.7)<br />
Γd nennt man auch Domäne eines Moves. D bezeichnet die Menge aller Moves; die<br />
Vereinigungsmenge der Domänen aller Moves ergibt den gesamten Lösungsraum:<br />
<br />
Γd = Γ (3.8)<br />
d∈D<br />
Zwei Konfigurationen σ,σ ′ ∈ Γ sind genau dann benachbart, wenn ein Move d ∈ D<br />
existiert mit:<br />
σ ′ = d(σ) (3.9)<br />
Unter der Nachbarschaft ND(σ) versteht man die Vereinigungsmenge aller Nachbarn<br />
von σ, also alle Konfigurationen σ ′ , die durch einen Move d∈D aus der Konfiguration<br />
σ hervorgehen:<br />
N = <br />
d(σ) (3.10)<br />
3.2 Energielandschaft<br />
d∈D,σ∈Γd<br />
Mit Hilfe der Nachbarschaft kann nun auch der Begriff des lokalen und globalen<br />
Minimums bzw. Maximums bestimmt werden: Eine Lösung σmin ∈ Γ heißt globales<br />
Minimum, wenn für alle Lösungen σ im Lösungsraum Γ gilt:<br />
H(σmin) ≤ H(σ) ∀ σ ∈Γ (3.11)
KAPITEL 3. PHYSIKALISCHE OPTIMIERUNGSALGORITHMEN 23<br />
σmax ∈Γ heißt globales Maximum, wenn für alle Lösungen σ im Lösungsraum Γ gilt:<br />
H(σmax) ≥ H(σ) ∀ σ ∈Γ (3.12)<br />
Eine Lösung σ ∈ Γ ist ein lokales Minimum, wenn für alle Lösungen σ ′ in der<br />
Nachbarschaft N(σ) gilt:<br />
H(σmin) ≤ H(σ ′ ) ∀ σ ′ ∈N (3.13)<br />
σmax ∈Γ heißt lokales Maximum, wenn für alle Lösungen σ ′ der Nachbarschaft gilt:<br />
H(σmax) ≥ H(σ ′ ) ∀ σ ′ ∈N (3.14)<br />
Die Struktur des Konfigurationsraums ist unabhängig von der Nachbarschaftsstruktur.<br />
Ordnet man die verschiedenen Konfigurationen nach der durch die Moves definierten<br />
Nachbarschaftsstruktur N, so ergibt sich der Suchraum. Durch diesen Suchraum<br />
bewegt man sich nun schrittweise während der <strong>Optimierung</strong>. Je größer die Variantenvielfalt<br />
der Moves, d.h. je mehr Moves in D enthalten sind, desto mehr Wege gibt es<br />
zwischen zwei Punkten im Suchraum und desto einfacher ist es, auf dem Weg zum<br />
globalen Optimum lokale Optima zu verlassen.<br />
Anschaulich bewegt man sich während der <strong>Optimierung</strong> von Punkt zu Punkt dieses<br />
Suchraums. Ordnet man jedem dieser Punkte die entsprechende Energie H(σ) zu,<br />
erhält man die sog. Hügel-Täler-Landschaft [Mo87] als Anschauung der Energielandschaft;<br />
dabei ist zu beachten, dass nur eine Dimension des im Allgemeinen hochdimensionalen<br />
Phasenraums dargestellt wird. Bei einer kleinen Anzahl von verschiedenen<br />
Abbildung 3.1: 2-dim Schnitt durch die Energielandschaft<br />
Moves ist es verständlich, dass häufiger lokale Minima und seltener das globale Minimum<br />
gefunden wird. Eine große Variantenvielfalt an Moves ermöglicht es, leichter eine<br />
Energiebarriere zu umgehen; das System bleibt also nicht im lokalen Minimum stecken.
KAPITEL 3. PHYSIKALISCHE OPTIMIERUNGSALGORITHMEN 24<br />
Um den Suchraum mit guten Resultaten in kurzer Zeit zu durchwandern, bedient<br />
man sich verschiedener Heuristiken. Diese unterscheiden sich hauptsächlich in der<br />
Wahl der Übergangswahrscheinlichkeit, oder anders ausgedrückt, der Akzeptanzregel<br />
für die Annahme einer neu erzeugten Konfiguration. Das grundsätzliche Vorgehen läßt<br />
sich folgendermaßen beschreiben:<br />
1. Beginne mit einer hinreichend hohen Starttemperatur T und einer beliebigen<br />
Startkonfiguration σ ∈Γ.<br />
2. Führe bis zum Abbruchkriterium folgende Schritte aus:<br />
Wiederhole (a) k-mal, um das System dem thermischen Gleichgewicht anzunähern.<br />
Führe die Schritte (a)-(b) N-mal durch.<br />
(a) Wiederhole folgende Schritte s-mal:<br />
• Anwendung eines Moves auf die aktuelle Konfiguration σ ∈ Γ und Erzeugung<br />
einer neuen Konfiguration σ ′ ∈Γ.<br />
• Berechnung von ∆H = H(σ ′ ) − H(σ).<br />
• Akzeptieren der Systemänderung, wenn sie das gewählte Kriterium erfüllt.<br />
Verwerfen der Änderung, falls das Kriterium verletzt wird.<br />
(b) Messung der gewünschten physikalischen Größen.<br />
(c) Absenkung der Systemtemperatur gemäß Abkühlschema.<br />
3. Wenn das Abbruchkriterium erfüllt ist, wird die letzte akzeptierte Konfiguration<br />
als Lösung ausgegeben.<br />
3.3 Algorithmen<br />
3.3.1 Random Walk und Greedy<br />
Die einfachste Akzeptanzregel ist der Random Walk (RW). Hier wird jeder Übergang<br />
σ → σ ′ angenommen, unabhängig von der Beschaffenheit von σ ′ :<br />
p(σ → σ ′ ) = 1 (3.15)<br />
Das entspricht dem lim(T → ∞). Der RW kann zwar jede theoretisch mögliche Konfiguration<br />
leicht erreichen, der Weg durch die Energielandschaft ist jedoch rein zufällig.<br />
Deshalb wird der RW meist nur dann angewendet, wenn die Energielandschaft eine<br />
glatte Struktur hat. Darüber hinaus erfüllt der RW nicht die Bedingung von Detailed<br />
Balance.<br />
Eine genaue Umkehrung der Vor-und Nachteile erhält man beim Greedy-Algorithmus.<br />
Hier werden nur Moves akzeptiert, die zu einer gleich guten oder besseren Konfiguration<br />
führen. Die Übergangswahrscheinlichkeit ist gegeben durch:<br />
p(σ → σ ′ ) = Θ(−∆H) (3.16)
KAPITEL 3. PHYSIKALISCHE OPTIMIERUNGSALGORITHMEN 25<br />
Θ(x) ist die Heaviside Stufenfunktion und ∆H = H(σi ′) − H(σi). Der Greedy bewegt<br />
sich zielstrebig auf das nächstgelegene lokale Minimum zu. Darin liegt aber auch das<br />
Problem: es kommt häufig dazu, dass der Greedy in einem lokalen Minimum gefangen<br />
bleibt, ohne von dem weiter entfernten globalen Minimum zu wissen. Der Greedy Algorithmus<br />
wird daher hauptsächlich für Systeme mit Energielandschaften benutzt, die<br />
entweder sehr wenige lokale Minima aufweisen, oder die Energiedifferenzen zwischen<br />
den lokalen Minima und dem globalen Minimum sehr gering sind.<br />
Die Energielandschaften sind jedoch in der Regel nicht bekannt und liegen meist<br />
zwischen den Extremen. Man versucht daher die Vorteile der beiden Algorithmen zu<br />
kombinieren: die Energielandschaft wird einerseits möglichst sorgfältig durchwandert,<br />
indem man die Energien der aktuellen und der neuen Konfigurationen vergleicht, andererseits<br />
nimmt man zeitweise Verschlechterungen der aktuellen Konfiguration in Kauf,<br />
weil man nur so das globale Minimum finden kann.<br />
3.3.2 Simulated Annealing - SA<br />
Beim Verfahren SA [KGV83] wird ein zu optimierendes System mit einer intrinsischen<br />
Systemtemperatur betrachtet. Diese Temperatur wird von anfänglich hohen Werten, bei<br />
denen das Systen eine große innere Freiheit besitzt, nach einem vorgegebenen Abkühlplan<br />
auf einen sehr niedrigen Wert abgesenkt. Die Freiheiten des Systems bei der Bewegung<br />
durch den Phasenraum werden also im zeitlichen Verlauf sukzessive eingeschränkt.<br />
Man wählt dabei als Übergangswahrscheinlichkeit zwischen zwei aufeinanderfolgenden<br />
Zuständen σ und σ ′ die Metropolis Funktion<br />
W(σi → σi ′) =<br />
<br />
<br />
exp<br />
− ∆H<br />
kBT<br />
<br />
1 : sonst<br />
: für ∆H > 0<br />
(3.17)<br />
Dieser <strong>Optimierung</strong>s-Algorithmus wird als Simulated Annealing bezeichnet. ∆H ist<br />
dabei die Energieänderung, die sich aus einem Übergang von Zustand σ nach σ ′ ergibt.<br />
Üblicherweise wird kB in der Simulation gleich Eins gesetzt. T hat dann die Bedeutung<br />
eines Kontrollparameters in den Einheiten von H. SA ist der klassische <strong>Optimierung</strong>s-<br />
Algorithmus in der <strong>Physik</strong>, um Zustände niedriger Energie bei komplexen Systemen zu<br />
finden, für die es keine analytischen Lösungswege gibt.<br />
Der Name des Verfahrens stammt aus der Metallurgie: beim Ausglühen wird ein<br />
Metall lange erhitzt und dann langsam abgekühlt. Mit zunehmender Abkühlung sinkt<br />
die Bewegungsfreiheit der Atome im Kristallgitter. Kühlt man sehr langsam ab, so<br />
bleibt das System im thermischen Gleichgewicht und die Atome können sich bei tiefen<br />
Temperaturen noch im Grundzustand anordnen. Kühlt man jedoch zu schnell ab, so<br />
bilden sich polykristalline oder amorphe Strukturen mit höherer Energie.<br />
SA erfüllt die Bedingung der Ergodizität: Nach P. und T. Ehrenfest (1911)[No02]<br />
ist ein System dann ergodisch, wenn die an die Hyperfläche H = const. gebundene<br />
Phasenraumtrajektorie im Lauf der Zeit jedem Punkt beliebig nahe kommt. Für den<br />
Fall eines diskreten Phasenraums muß die Trajektorie jeden Punkt erreichen können.<br />
Anschaulich ist die Phasenraumtrajektorie sozusagen der “Weg“ des Systems durch<br />
den Phasenraum. Wichtig wird die Ergodizität für die Berechnung der Erwartungswerte
KAPITEL 3. PHYSIKALISCHE OPTIMIERUNGSALGORITHMEN 26<br />
von Observablen. Bei ergodischen Systemen gilt die Gleichheit von Schar- und Zeitmittel.<br />
Allerdings ist die Ergodizität bei glasartigen Systemen nicht erfüllt: es kommt hier<br />
auf die Meßzeit τ an; das System muß in der Zeit τ ins Gleichgewicht kommen.<br />
SA ist ein sehr leistungsfähiges Verfahren, um kombinatorische <strong>Optimierung</strong>sprobleme<br />
zu behandeln. Dieser Algorithmus kann auch für viele N P -vollständige Probleme<br />
angewandt werden. N P-vollständig sind Probleme, für die kein deterministischer Algorithmus<br />
existiert, der das Problem in einer Zeit t< N x optimal löst. Dabei ist N<br />
die Systemgröße und der Exponent x eine obere Abschätzung für den Rechenzeitbedarf.<br />
Vollständig heißt dabei, dass alle Probleme dieser Klasse durch eine polynomiale<br />
Abbildung ineinander überführt werden können.<br />
3.3.3 Threshold Accepting - TA<br />
Das Toleranzschwellenverfahren Threshold Accepting (TA) [DS90] ist ein <strong>Optimierung</strong>salgorithmus,<br />
mit formaler Ähnlichkeit zu Simulated Annealing. Die Übergangswahrscheinlichkeit<br />
einer Konfiguration σi zu einer anderen σi ′ wird jedoch nicht durch<br />
die Metropolisfunktion bestimmt. Vielmehr soll gelten:<br />
<br />
1 : für ∆H ≤ Th<br />
W(σi → σi ′) = Θ(Th − ∆H) =<br />
(3.18)<br />
0 : sonst<br />
Dabei ist Θ die Stufenfunktion und Th wird als Threshold oder Toleranzschwelle<br />
bezeichnet. Th ist eine Art Kontrollparameter oder Pseudotemperatur. Während des<br />
<strong>Optimierung</strong>sprozesses wird dieser Schwellenwert von einem hohen Anfangswert schrittweise<br />
auf Null abgesenkt. Dieses Verfahren garantiert, dass eine neue Konfiguration σi ′<br />
niemals angenommen wird, falls sich die vorhergehende Lösung σi stark verschlechtern<br />
würde.<br />
Demgegenüber können bei SA mit einer gewissen Wahrscheinlichkeit auch diese<br />
Lösungen akzeptiert werden. Dadurch ist beim TA-Verfahren die Bedingung der Ergodizität<br />
verletzt, da nicht jeder Punkt im Phasenraum erreicht werden kann; ein thermisches<br />
Gleichgewicht wird sich dann nicht mehr einstellen. Threshold Accepting ist<br />
deshalb ein Nichtgleichgewichts-Algorithmus und stellt somit kein physikalisches Verfahren<br />
dar. Auch das Prinzip von Detailed Balance wird nicht erfüllt.<br />
In Abbildung 3.3 links sind a und c zwei benachbarte Konfigurationen; a kann von<br />
der energetisch höher liegenden Konfiguration c aus problemlos erreicht werden. Sobald<br />
sich das System jedoch im Zustand a befindet, kann c ohne Zwischenstufen nicht mehr<br />
erreicht werden, wenn der Threshold zu klein ist. Die Ergodizität ist verletzt.<br />
In Abbildung 3.3 rechts sind a, b, c paarweise benachbarte Konfigurationen. Während<br />
es nun ohne weiteres möglich ist, von Zustand c den energetisch tieferliegenden Zustand<br />
a zu erreichen, ist die Umkehrung wegen des zu kleinen Thresholds nicht möglich; c<br />
kann nur über die Konfiguration b erreicht werden.<br />
Ein spezielles Problem von Threshold Accepting sind die sog. Golfholes: ist eine<br />
Konfiguration σ∗ ausschließlich von Nachbarn σi umgeben, für welche gilt:<br />
H(σi) − H(σ∗) > Th,
KAPITEL 3. PHYSIKALISCHE OPTIMIERUNGSALGORITHMEN 27<br />
Abbildung 3.2: Verletzung der Ergodizität (links) und Verletzung von Detailed Balance<br />
(rechts).<br />
dann können diese Konfigurationen von σ∗ aus nicht mehr erreicht werden. Manche<br />
Energielandschaften weisen verhältnismäßig schmale, tiefe lokale Minima auf. Befindet<br />
sich das System in einem solchen Golfhole und ist der Threshold entsprechend klein, so<br />
bleibt das System in diesem lokalen Minimum gefangen (Abbildung ??). Während bei<br />
SA das Golfhole in endlicher Zeit wieder verlassen wird, bleibt bei TA das System in dem<br />
lokalen Minimum gefangen. Aus diesem Grund ist es bei Threshold Accepting günstiger,<br />
mehrere kürzere <strong>Optimierung</strong>släufe durchzuführen, deren Ergebnisse dann verglichen<br />
werden können. Weil der TA-Algorithmus unphysikalisch ist, haben die berechneten<br />
Abbildung 3.3: Verletzung der Ergodizität (links) und Verletzung von Detailed Balance<br />
(rechts).<br />
Größen keine physikalische Bedeutung im engeren Sinne. Da die Größen jedoch in den<br />
bekannten Relationen zueinander stehen und wesentliche Aussagen über das System
KAPITEL 3. PHYSIKALISCHE OPTIMIERUNGSALGORITHMEN 28<br />
erlauben, werden sie daher weiterhin unter den bekannten Bedeutungen geführt.<br />
TA kann als Näherung von SA betrachtet werden, wenn man die Flächen unter<br />
den Kurven für die Übergangswahrscheinlichkeit gleichsetzt. Die Stufenfunktion von<br />
TA tritt an die Stelle der exponentiellen Kurve bei SA. Beim Übergang von einem<br />
ungeordneten, energiereichen in einen geordneten, energiearmen Zustand kann man<br />
daher davon ausgehen, dass T und Th die gleiche Größenordnung besitzen.<br />
Trotz der Nachteile hat sich Threshold Accepting etabliert. Der Vorteil nämlich ist,<br />
dass bei der Berechnung der Übergangswahrscheinlichkeit nur Th mit ∆H verglichen<br />
wird, während bei SA jeweils die rechenintensive Exponentialfunktion berechnet werden<br />
muss. In der Praxis werden daher viele kürzere <strong>Optimierung</strong>släufe mit TA durchgeführt;<br />
meist erhält man mehrere gute Lösungen ohne allzu großen Rechenaufwand.<br />
3.3.4 Great Deluge Algorithm - GDA<br />
Ein anderes sehr einfaches und erfolgreiches <strong>Optimierung</strong>sverfahren ist der Sintflut-<br />
Algorithmus (Great Deluge Algorithm). Man führt einen Random Walk durch einen<br />
Teil ΓS des Phasenraums Γ durch [Nu93]. Jede Konfiguration σi ∈ ΓS ist dadurch gekennzeichnet,<br />
dass die Energie von σi unter einem gewissen Niveau TS liegt. Die Übergangswahrscheinlichkeit<br />
von σi ∈ ΓS zu σj ∈ Γ ist durch die Heaviside-Stufenfunktion<br />
gegeben:<br />
W(σi → σj) =<br />
1 : für H(σj) ≤ TS<br />
0 : sonst<br />
(3.19)<br />
Jede Konfiguration σi mit geringerer Energie als das Niveau TS wird mit gleicher Wahrscheinlichkeit<br />
akzeptiert. TS bezeichnet man als Water-Level oder wieder als Pseudotemperatur.<br />
Durch ein langsames Absenken des Wasserstands TS wird das System<br />
gezwungen, eine energetisch günstigere Konfiguration anzunehmen.<br />
Abbildung 3.4: Sintflut-Algorithmus
KAPITEL 3. PHYSIKALISCHE OPTIMIERUNGSALGORITHMEN 29<br />
Wie beim Threshold Accepting besteht somit die Gefahr, dass sich das System in<br />
einem lokalen Minimum festsetzt; die Bedingung der Ergodizität ist verletzt, da nicht<br />
mehr alle Punkte des Phasenraums erreicht werden können. Somit kann sich kein thermodynamisches<br />
Gleichgewicht einstellen (Abbildung 3.4); das Sintflut-Verfahren ist ein<br />
Nichtgleichgewichts-Algorithmus. Detailed Balance wird allerdings erfüllt, denn zu einem<br />
gegebenen T sind alle Konfigurationen unter dem Niveau TS gleich wahrscheinlich.<br />
Der Algorithmus ist benannt nach der Sintflut im Alten Testament. Dreht man<br />
nämlich die Problemstellung um und sucht das Maximum des Phasenraums, dann läßt<br />
sich TS als Wasserstand interpretieren, der wie bei einer Sintflut ständig steigt. Problematisch<br />
dabei ist die Inselbildung in der Energielandschaft bei zunehmendem Wasserstand;<br />
möglicherweise befindet man sich nicht auf dem höchsten Berg, sondern auf<br />
einem wesentlich kleineren. Bei hochdimensionalen Problemen gibt es aber zu einem<br />
Zustand σi sehr viele Nachbarn, und man kann in viele Richtungen vor dem Wasser<br />
zurückweichen. Dies erklärt, warum das Sintflut-Verfahren bei vielen komplexen <strong>Optimierung</strong>sverfahren<br />
nahezu optimale Ergebnisse liefert.<br />
3.4 Sonstiges<br />
Abkühlverfahren<br />
Für Simulated Annealing wurden Abkühlschemata entwickelt, die bei unendlich langer<br />
Rechenzeit ein globales Optimum garantieren, wenn man die Temperatur folgenderma-<br />
ßen berechnet:<br />
Tk =<br />
a<br />
b + log(k)<br />
(3.20)<br />
Dabei sind a und b positive, systemabhängige Konstanten und k ist die Anzahl der bereits<br />
durchgeführten Iterationen (Temperaturschritte). Der Nachteil dieses Verfahrens<br />
ist, dass die Rechenzeit größer ist als die vollständige Aufzählung sämtlicher Konfigurationen.<br />
Ein anderes Problem ist, dass nicht sicher ist, ob man wirklich ein globales<br />
Optimum gefunden hat. Diese Abkühlstrategie ist also in der Praxis nicht verwendbar;<br />
stattdessen bedient man sich empirischer Abkühlkurven, die deutlich schneller gegen<br />
T=0 konvergieren.<br />
An erster Stelle der empirischen Verfahren ist die Lineare Abkühlung zu nennen.<br />
Dabei wird die Temperatur bei jedem Schritt um einen konstanten Betrag ∆T<br />
verringert:<br />
Tk = Tstart − k∆T mit 0.01 ≤ ∆T ≤ 0.5 (3.21)<br />
Tstart ist die Anfangstemperatur, die bei jedem <strong>Optimierung</strong>slauf speziell bestimmt<br />
werden muß. Es ist zu beachten, dass Tk niemals kleiner als Null werden darf; der Lauf<br />
ist also ggf. vorher abzubrechen.<br />
Bei der logarithmischen oder exponentiellen Abkühlung wird die Anfangstemperatur<br />
durch wiederholte Multiplikation mit einem Faktor α gesenkt:<br />
Tk = α k Tstart mit 0.8 ≤ α ≤ 0.999 (3.22)
KAPITEL 3. PHYSIKALISCHE OPTIMIERUNGSALGORITHMEN 30<br />
Die Auswahl eines Abkühlverfahrens hängt vom <strong>Optimierung</strong>sproblem ab. Idealerweise<br />
führt man vorab einen Testlauf durch, um den groben Verlauf der physikalischen<br />
Kenngrößen abzuschätzen. Besonders aus der spezifischen Wärme läßt sich gut ableiten,<br />
wie sich das System verhält. Bei schnellem Einfrieren des Systems verwendet<br />
man das lineare Abkühlverfahren, während bei länger andauernden Umordnungen das<br />
logarithmische Verfahren besser ist.<br />
Start- und Endtemperaturen<br />
Die Wahl der Ausgangstemperatur ist sehr wichtig für den Verlauf der <strong>Optimierung</strong>saufgaben.<br />
Wählt man die Starttemperatur zu hoch, dann wird Rechenzeit zu Beginn<br />
des Laufes vergeudet. Wählt man sie zu niedrig, dann ergeben sich häufig schlechte<br />
Lösungen. Die Anfangstemperatur direkt anzugeben ist äußerst schwierig, weil sie vom<br />
jeweiligen <strong>Optimierung</strong>sproblem abhängt. Eine geeignete Start-Temperatur für SA läßt<br />
sich folgendermaßen finden:<br />
Bei der Temperatur Tstart soll sich das System nahezu ungehindert im Phasenraum<br />
bewegen können. Zu Beginn sollen also auch Übergänge akzeptiert werden, die die<br />
Energie des Systems erhöhen. Die Akzeptanzrate Pacc für diese Übergänge kann man<br />
sich frei vorgeben. Dann führt man einen Random Walk durch den Phasenraum durch<br />
und misst die Anzahl n der Übergänge, die die Energie des Systems jeweils erhöhen.<br />
Die Anzahl der akzeptierten Übergänge bei SA läßt sich wiefolgt nähern:<br />
<br />
nacc ≈ n · exp − ∆ ¯ <br />
H+<br />
Tstart<br />
(3.23)<br />
wobei ∆ ¯ H+ der Mittelwert der Energieänderung der Energie-erhöhenden Übergänge<br />
ist. Die Akzeptanzrate Pacc wird durch<br />
Pacc = nacc<br />
<br />
≈ exp −<br />
n ∆ ¯ <br />
H+<br />
(3.24)<br />
Tstart<br />
gegeben. Daraus folgt:<br />
Tstart ≈ − ∆ ¯ H+<br />
lnPacc<br />
(3.25)<br />
Die Akzeptanzrate wird meistens zwischen 80% und 90% gewählt. Natürlich ist dies<br />
nur eine sehr grobe Abschätzung für Tstart; die Größenordnung der Temperatur läßt<br />
sich mit dieser Methode aber recht schnell ermitteln. Eine ähnliche Überlegung läßt<br />
sich auch für Threshold Accepting und Great Deluge anstellen:<br />
Tstart ≈ ∆ ¯ H+ Threshold Accepting (3.26)<br />
TSstart ≈ Hmax Sintflut-Verfahren (3.27)<br />
Die Endtemperatur Tend soll so bestimmt werden, dass das System möglichst vollständig<br />
eingefroren ist, die Akzeptanzrate aller Übergänge also gegen Null strebt. Bei<br />
entarteten Systemen können jedoch Übergänge auftreten, die keine Energieänderung
KAPITEL 3. PHYSIKALISCHE OPTIMIERUNGSALGORITHMEN 31<br />
bewirken. Diese dürfen dann in die Berechnung der Akzeptanzrate nicht mit einbezogen<br />
werden. Vorteilhaft ist es auch, am Ende eines Laufes mehrere Schritte bei T=0<br />
durchzuführen. Ist die Akzeptanzrate aller nicht-trivialen Übergänge über einen längeren<br />
Zeitraum gleich Null, so wird der <strong>Optimierung</strong>slauf abgeschlossen. Natürlich läßt<br />
sich nicht mit Sicherheit sagen, ob ein globales Optimum erreicht worden ist; das Auffinden<br />
eines lokalen Optimums ist dagegen sehr wahrscheinlich.<br />
Besonders bei Systemen mit sehr breiten Energietälern im Bereich des globalen Minimums<br />
besteht jedoch die Möglichkeit, dass die Akzeptanzrate noch deutlich über Null<br />
liegt, obwohl sich die Energie nicht mehr verringert. In diesem Fall ist es vorzuziehen,<br />
die Hamiltonfunktion selbst als Kriterium für die Nähe des Systems zum Optimum zu<br />
verwenden und das System als eingefroren zu betrachten, sobald sich die Energie über<br />
eine Reihe von Temperaturschritten nicht mehr ändert.
Literaturverzeichnis<br />
[BH02] K. Binder, D.W. Heermann: Monte Carlo Simulation in Statistical Physics,<br />
Springer Verlag, Berlin-Heidelberg, 2002<br />
[Br98] J. Britze: Anwendung von Methoden der Statistischen <strong>Physik</strong> auf <strong>Optimierung</strong>sprobleme<br />
der Materialplanung, <strong>Universität</strong> <strong>Regensburg</strong>, Diplomarbeit, 1998<br />
[DS90] G. Dueck, T. Scheuer: Threshold Accepting: A General Purpose Optimization<br />
Algorithm Appearing Superior to Simulated Annealing, J.Comp.Phys. 90, 161,<br />
1990<br />
[FH91] K.H. Fischer, J.A. Hertz: Spin glasses, Cambridge University Press, Cambridge,<br />
1991<br />
[Ge97] U. Gebauer: Anwendung und Vergleich physikalischer und herkömmlicher <strong>Optimierung</strong>sverfahren<br />
im Bereich der Materialbeschaffung, <strong>Universität</strong> <strong>Regensburg</strong>,<br />
Diplomarbeit, 1997<br />
[GM85] S.B. Gelfand, S.K. Mitter: Analysis of Simulated Annealing for Optimization,<br />
Proc.24 Conf. on Decision and Control, 779, 1985<br />
[HR02] A.K. Hartmann, H. Rieger: Optimization Algorithms in Physics, Wiley-VCH<br />
Verlag, Berlin 2002<br />
[KGV83] S. Kirkpatrick, C.D. Gelatt Jr., M.P. Vecchi: Optimization by Simulated Annealing,<br />
Science 220, 671, 1983<br />
[Ko93] K. Kopitzki: Einführung in die Festkörperphysik, Teubner Studienbücher <strong>Physik</strong>,<br />
Stuttgart, 1993<br />
[KR96] W. Kinzel, G. Reents: <strong>Physik</strong> per Computer, Spektrum Akademischer Verlag,<br />
Heidelberg, 1996<br />
[Li03] M. Lichtinger: <strong>Optimierung</strong> von Portfolios mit Methoden der Spinglasphysik,<br />
<strong>Universität</strong> <strong>Regensburg</strong>, Dissertation, 2003<br />
[Mo87] I. Morgenstern: Spin glasses, Optimization and Neural Networks in J.L. van<br />
Hemmen und I.Morgenstern (Hrsg.): Heidelberg Colloquium on Glassy Dynamics,<br />
Springer Verlag, Berlin-Heidelberg, 1987<br />
32
LITERATURVERZEICHNIS 33<br />
[MS00] R.V. Mantegna, H.E. Stanley: Introduction to Econophysics: Correlation and<br />
Complexity in Finance, Cambridge University Press, 2000<br />
[My93] J.A. Mydosh: Spin Glasses, Taylor & Francis, London, 1993<br />
[Ni00] B. Niedermeier: Risikomanagement an der Börse mit physikalischen <strong>Optimierung</strong>sverfahren,<br />
<strong>Universität</strong> <strong>Regensburg</strong>, Diplomarbeit, 2000<br />
[No02] W. Nolting: Grundkurs Theoretische <strong>Physik</strong>, Band 6, Statistische <strong>Physik</strong>, Springer<br />
Verlag, Berlin-Heidelberg, 2002<br />
[Sch99] J. Schneider: Effiziente parallelisierbare physikalische <strong>Optimierung</strong>sverfahren,<br />
<strong>Universität</strong> <strong>Regensburg</strong>, Dissertation, 1999<br />
[St93] D. Stein: Spingläser, aus ”Chaos und Fraktale”, Spektrum der Wissenschaft,<br />
Spektrum Verlag, Heidelberg, 1993<br />
[Vor89] Vorlesungsskripten: Computersimulation in der <strong>Physik</strong>, 20.IFF-Ferienkurs,<br />
Kernforschungsanlage Jülich, 1989