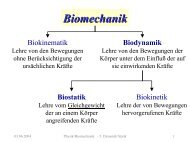
Kinematik/Rotation
Kinematik/Rotation
Kinematik/Rotation

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Winkelmessung<br />
• Alle Winkelmaße in der Ebene (Ebene Winkel) beruhen auf Kreisteilungen.<br />
• Alte Winkeleinheit: Durch Teilung des Vollkreises mit 360 Radien, erhält man<br />
zwischen zwei benachbarten Radien die Winkeleinheit 1 Grad (1°).<br />
- Dieses Gradmaß entspricht unserer Vorstellungswelt.<br />
- Winkel von 90°, 45° oder auch 30° sind gut abschätzbar.<br />
• Gelenkwinkelangaben in der Medizin erfolgen nach der<br />
Neutral-Null-Methode:<br />
- Alle Winkel werden ausgehend von der Grundstellung<br />
(Aufrechte Haltung,<br />
Kopf geradeaus, Blick nach vorn,<br />
Arme seitlich herabhängend, Daumen ventral,<br />
Füße parallel) angegeben.<br />
• Für Berechnungen (die in der Regel im Dezimalsystem erfolgen) verwendet man<br />
praktischer Weise das Bogenmaß.<br />
Dabei wird der Kreisumfang in Längen des zugehörigen Radius geteilt (1 rad).<br />
• Ausgehend vom Kreisumfang U = 2πr ergeben sich beim Einheitskreis (r = 1) die<br />
Äquivalenzen: 360° ⇔ 2π; 180° ⇔π; 90° ⇔π/2; 45° ⇔π/4 ; 30° ⇔π/6. 03.06.2004 Physik/Biomechanik - 3. <strong>Kinematik</strong>/<strong>Rotation</strong> 1
)<br />
30°<br />
⇒ x<br />
Umrechnungen<br />
Grad- in Bogenmaß<br />
180°<br />
⇒ π<br />
)<br />
30°<br />
x<br />
=<br />
180°<br />
π<br />
) 30°<br />
1<br />
x = ⋅π<br />
= π<br />
180°<br />
6<br />
Bogen- in Gradmaß<br />
0,<br />
52<br />
⇒ x°<br />
π ⇒180°<br />
0,<br />
52 x°<br />
=<br />
π 180°<br />
0,<br />
52<br />
x°<br />
= ⋅180°<br />
= 30°<br />
π<br />
03.06.2004 Physik/Biomechanik - 3. <strong>Kinematik</strong>/<strong>Rotation</strong> 2
Übungen zum Winkelschätzen:<br />
Winkelmaß<br />
180°<br />
Bogenmaß<br />
π = 3,14<br />
03.06.2004 Physik/Biomechanik - 3. <strong>Kinematik</strong>/<strong>Rotation</strong> 3
<strong>Kinematik</strong> - Äquivalenz der Größen<br />
Translation<br />
(rechtwinklige Koordinaten)<br />
Ort,<br />
Weg<br />
Zeit<br />
Geschwindigkeit<br />
Beschleunigung<br />
x; y; z; s<br />
[mm; m; km]<br />
t<br />
[ms; s; h]<br />
v<br />
[m/s; km/h]<br />
a Tra<br />
[m/s²]<br />
Abstand (Radius),<br />
Winkel<br />
Winkelgeschwindigkeit<br />
Drehzahl,<br />
Bewegungsfrequenz<br />
Winkelbeschleunigung<br />
ω<br />
[°/s; 1/s; U/min]<br />
a Rot; α<br />
[°/s²; 1/s²]<br />
03.06.2004 Physik/Biomechanik - 3. <strong>Kinematik</strong>/<strong>Rotation</strong> 4<br />
Zeit<br />
<strong>Rotation</strong><br />
(Winkelkoordinaten)<br />
r [m]<br />
ϕ [°; Bogenmaß]<br />
t<br />
[s]
Gleichförmige Kreisbewegung<br />
Winkelgeschwindigkeit: ω = konstant<br />
Die Bahn, entlang derer sich ein Körper<br />
bei einer ebenen Kreisbewegung bewegt,<br />
lässt sich sehr einfach mit einem Vektor<br />
beschreiben.<br />
Dieser Vektor hat nur eine zeitabhängige, nichtkonstante Komponente.<br />
Der Winkel ϕ ist eine Funktion der Zeit.<br />
r<br />
⎛cosϕ(<br />
t)<br />
⎞ r ⎛cos(<br />
ϖ ⋅t)<br />
⎞<br />
R(<br />
t)<br />
= r ⋅⎜<br />
⎟ → R(<br />
t)<br />
= r ⋅⎜<br />
⎟<br />
⎝sinϕ(<br />
t)<br />
⎠ ⎝ sin( ϖ ⋅t)<br />
⎠<br />
03.06.2004 Physik/Biomechanik - 3. <strong>Kinematik</strong>/<strong>Rotation</strong> 5
Geschwindigkeit<br />
• Zwischen den Zeitpunkten t1 und t2 (t1 < t2) hat der Körper<br />
seine Lage so verändert, wie es der Vektor ∆t beschreibt.<br />
• Die zeitbezogene Änderung des Ortes ist die Geschwindigkeit<br />
• Die Geschwindigkeit ist ein Vektor.<br />
1<br />
0,5<br />
0<br />
-0,5<br />
-1<br />
r<br />
dR<br />
dt<br />
r ⎛−<br />
sin( ϖ ⋅t)<br />
⎞<br />
= v(<br />
t)<br />
= r ⋅ϖ<br />
⋅⎜<br />
⎟<br />
⎝ cos( ϖ ⋅t)<br />
⎠<br />
Vx Vy<br />
90°<br />
0 90 180 270 360<br />
Der Geschwindigkeitsvektor<br />
verläuft in jedem Punkt der<br />
Kreisbahn tangential!<br />
= r ⋅ϖ<br />
03.06.2004 Physik/Biomechanik - 3. <strong>Kinematik</strong>/<strong>Rotation</strong> 6<br />
v B<br />
Der Betrag der<br />
Bahngeschwindigkeit ist bei der<br />
gleichförmigen Kreisbewegung<br />
(ω = konst.) zwar konstant, aber<br />
die Richtung ändert sich ständig!
dv<br />
dt<br />
=<br />
Beschleunigung<br />
r<br />
2 ⎛ −sin(<br />
ϖ ⋅t)<br />
⎞<br />
a(<br />
t)<br />
= r ⋅ϖ<br />
⋅⎜<br />
⎟<br />
⎝−<br />
cos( ϖ ⋅t)<br />
⎠<br />
Die zeitbezogene Änderung der<br />
Geschwindigkeit ist die Beschleunigung.<br />
Sie ergibt sich aus der vektoriellen<br />
Differenz der Geschwindigkeitsvektoren<br />
∆v zum Zeitpunkt t 2 und t 1.<br />
Der Beschleunigungsvektor ist bei<br />
gleichförmiger Kreisbewegung dem<br />
Betrag nach konstant und verläuft in<br />
jedem Punkt der Kreisbahn in radialer<br />
Richtung zum Drehpunkt!<br />
a radial<br />
2<br />
= r ⋅ϖ<br />
Die gleichförmige Kreisbewegung ist eine gleichmäßig beschleunigte Bewegung!<br />
Diese Beschleunigung ist Ursache für die bekannte Radial- bzw. Fliehkraft.<br />
03.06.2004 Physik/Biomechanik - 3. <strong>Kinematik</strong>/<strong>Rotation</strong> 7
Wie groß ist die auf das Schultergelenk wirkende Fliehkraft<br />
beim Armkreisen mit einer gleichmäßigen Geschwindigkeit<br />
von einer Umdrehung pro Sekunde ?<br />
Masse Länge<br />
Oberarm 2,7% der KM 30cm<br />
Unterarm 1,6% der KM 25cm<br />
Faust 0,6% der KM 10cm<br />
Oberarm Unterarm<br />
Hand<br />
03.06.2004 Physik/Biomechanik - 3. <strong>Kinematik</strong>/<strong>Rotation</strong> 8
03.06.2004 Physik/Biomechanik - 3. <strong>Kinematik</strong>/<strong>Rotation</strong> 9<br />
Lösung<br />
Lösung<br />
Hand<br />
Hand<br />
RUnterarm<br />
Unterarm<br />
ROberarm<br />
Oberarm<br />
Hand<br />
Unterarm<br />
Oberarm<br />
a<br />
m<br />
a<br />
m<br />
a<br />
m<br />
F<br />
F<br />
F<br />
F<br />
F<br />
r<br />
v<br />
r<br />
r<br />
r<br />
r<br />
r<br />
r<br />
⋅<br />
+<br />
⋅<br />
+<br />
⋅<br />
=<br />
+<br />
+<br />
=<br />
( ) ( )<br />
²<br />
²<br />
1<br />
²<br />
²<br />
1<br />
²<br />
²<br />
1<br />
²<br />
1<br />
2<br />
2<br />
7<br />
,<br />
23<br />
5<br />
,<br />
39<br />
6<br />
,<br />
0<br />
8<br />
,<br />
16<br />
5<br />
,<br />
39<br />
43<br />
,<br />
0<br />
92<br />
,<br />
5<br />
5<br />
,<br />
39<br />
15<br />
,<br />
0<br />
5<br />
,<br />
39<br />
2<br />
360<br />
²<br />
²<br />
:<br />
s<br />
m<br />
s<br />
Hand<br />
s<br />
m<br />
s<br />
Unterarm<br />
s<br />
m<br />
s<br />
Oberarm<br />
s<br />
R<br />
m<br />
a<br />
m<br />
a<br />
m<br />
a<br />
s<br />
s<br />
r<br />
a<br />
hleunigung<br />
Radialbesc<br />
=<br />
⋅<br />
=<br />
=<br />
⋅<br />
=<br />
=<br />
⋅<br />
=<br />
=<br />
=<br />
°<br />
=<br />
⋅<br />
=<br />
r<br />
r<br />
r<br />
π<br />
ω<br />
ω<br />
kg<br />
m<br />
kg<br />
m<br />
kg<br />
m<br />
kg<br />
e<br />
Körpermass<br />
Hand<br />
Unterarm<br />
Oberarm<br />
36<br />
,<br />
0<br />
04<br />
,<br />
1<br />
755<br />
,<br />
1<br />
65<br />
:<br />
=<br />
=<br />
=<br />
N<br />
N<br />
N<br />
N<br />
F<br />
kg<br />
kg<br />
kg<br />
F s<br />
m<br />
s<br />
m<br />
s<br />
m<br />
4<br />
,<br />
36<br />
5<br />
,<br />
8<br />
5<br />
,<br />
17<br />
4<br />
,<br />
10<br />
7<br />
,<br />
23<br />
36<br />
,<br />
0<br />
8<br />
,<br />
16<br />
04<br />
,<br />
1<br />
92<br />
,<br />
5<br />
755<br />
,<br />
1 ²<br />
²<br />
²<br />
=<br />
+<br />
+<br />
=<br />
⋅<br />
+<br />
⋅<br />
+<br />
⋅<br />
=<br />
r<br />
r
Beispielaufgabe / <strong>Rotation</strong><br />
Welche Winkelgeschwindigkeit hat<br />
die Tretkurbel (l = 18cm) am Fahrrad<br />
bei einer Drehzahl von<br />
A) 60 U/min B) 90 U/min und C) 120 U/min?<br />
D) Wie groß ist die als konstant angenommene Winkelbeschleunigung<br />
bei einem Antritt von 90 auf 120 U/min in 1s?<br />
E) Wie groß ist die Bahngeschwindigkeit einer Pedale bei 120 U/min<br />
und die entsprechende Radialbeschleunigung?<br />
03.06.2004 Physik/Biomechanik - 3. <strong>Kinematik</strong>/<strong>Rotation</strong> 10
Beispielaufgabe / <strong>Rotation</strong><br />
Welche Winkelgeschwindigkeit hat die Tretkurbel (l = 18cm)?<br />
Drehzahl Gradmaß Bogenmaß<br />
60 U/min 1 U/s 360°/s 6,28 1/s<br />
90 U/min 1,5 U/s 540°/s 9,42 1/s<br />
120 U/min 2 U/s 720°/s 12,57 1/s<br />
Winkelbeschleunigung bei einem Antritt von 90 auf 120 U/min in 1s?<br />
α = ∆ω/∆t = (720°/s - 540°/s)/1s = 180°/s²<br />
Bahngeschwindigkeit einer Pedale bei 120 U/min?<br />
v B = r ω = 0,18m 12,57s -1 = 2,3 m/s<br />
Radialbeschleunigung?<br />
a Radial = r ω² = 0,18m (12,57s -1 )² = 28 m/s²<br />
03.06.2004 Physik/Biomechanik - 3. <strong>Kinematik</strong>/<strong>Rotation</strong> 11
Beispielaufgabe / <strong>Kinematik</strong><br />
Kurt Browning, Kanada, Weltmeister 89/90/91<br />
Die sportliche Leistung beim Eiskunstlaufen wird<br />
subjektiv durch Preisrichter eingeschätzt.<br />
Das menschliche Auge kann aber nur eine<br />
beschränkte Anzahl Bilder wahrnehmen<br />
(Flimmerverschmelzungsfrequenz bei Tageslicht 60 Bilder/s).<br />
Könnte ein Preisrichter eindeutig einen Vier- und<br />
einen Fünffachsprung unterscheiden ?<br />
A) Die Sprunghöhe beim Dreifachaxel von K. Browning bei der WM<br />
1991 betrug 74cm. Wie lange dauerte dieser Sprung?<br />
(Dreifachaxel → 3,5 Drehungen um die Körperlängsachse; Fallzeit = Steigzeit)<br />
B) Welche mittl. Winkelgeschwindigkeit hatte der Sportler bei diesem<br />
Sprung?<br />
C) Welche Winkelgeschwindigkeiten währen bei keiner wesentlichen<br />
Steigerung der Sprunghöhe für den Vier- bzw. Fünffachsprung<br />
notwendig?<br />
03.06.2004 Physik/Biomechanik - 3. <strong>Kinematik</strong>/<strong>Rotation</strong> 12
Beispielaufgabe / <strong>Kinematik</strong><br />
Sprunghöhe 74cm beim Dreifachaxel, wie lange dauerte dieser Sprung?<br />
Fallzeit = Steigzeit<br />
2 2s<br />
2⋅<br />
0,<br />
74m<br />
1 s = 2 gt t =<br />
= = 0,<br />
388s<br />
g 9,<br />
81m<br />
tSprung =0,777s<br />
Mittlere Winkelgeschwindigkeit?<br />
Dreifachaxel: 3,5 Umdrehungen entspricht 1260° bzw. 7π = 22<br />
ω = 1622°/s = 28,3 1/s<br />
Winkelgeschwindigkeiten für den Vier- bzw. Fünffachsprung?<br />
Sprunghöhe 4-fach (4,5 Drehungen) 5-fach (5,5 Drehungen)<br />
75cm 2071°/s 2532°/s<br />
80cm 2006°/s 2451°/s<br />
85cm 1946°/s 2378°/s<br />
s²<br />
03.06.2004 Physik/Biomechanik - 3. <strong>Kinematik</strong>/<strong>Rotation</strong> 13
Differentiation<br />
Integration<br />
<strong>Rotation</strong><br />
Winkel<br />
ϕ [°]<br />
ϖ =<br />
dϕ<br />
dt<br />
α =<br />
ϕ = ϖ dt<br />
ϕ<br />
∫<br />
ϖ =<br />
Winkelgeschwindigkeit<br />
ϖ [°/s]<br />
ϕ<br />
t<br />
Bed . : α = 0 °<br />
s<br />
dϕ<br />
d ² t<br />
ϕ = ϖt<br />
+ ϕ<br />
Bed . : ϖ<br />
= konst.<br />
²<br />
α =<br />
α =<br />
dϖ<br />
dt<br />
Winkelbeschleunigung<br />
α [°/s²]<br />
α =<br />
Bed . : α = konst.<br />
03.06.2004 Physik/Biomechanik - 3. <strong>Kinematik</strong>/<strong>Rotation</strong> 14<br />
2ϕ<br />
t²<br />
Bed . : α = konst.<br />
ϖ = α dt<br />
∫<br />
ϖ<br />
t<br />
Bed . : α = konst.<br />
ϖ = αt<br />
+ ϖ<br />
Bed . : α = konst.<br />
α d²<br />
t = ( αt<br />
ϖ )dt<br />
ϕ = αt<br />
+ ϖ t +<br />
∫∫ ∫ +<br />
= 0<br />
0<br />
1<br />
2 ² 0 ϕ0<br />
0
03.06.2004 Physik/Biomechanik - 3. <strong>Kinematik</strong>/<strong>Rotation</strong> 15

![B-[20] Fachabteilung Psychotherapie und Psychosomatik](https://img.yumpu.com/12525973/1/184x260/b-20-fachabteilung-psychotherapie-und-psychosomatik.jpg?quality=85)