Materialflusssteuerungen, SPS, SAIL
Materialflusssteuerungen, SPS, SAIL
Materialflusssteuerungen, SPS, SAIL

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
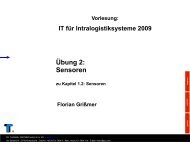
IT für Intralogistiksysteme<br />
Start<br />
Schritt<br />
1<br />
Schritt<br />
2<br />
Schritt<br />
3<br />
Schritt<br />
4<br />
Schritt<br />
5<br />
Schritt<br />
6<br />
E9 = 1 (Palette in Position)<br />
E7 = 1 (Drehtisch in Grundstellung)<br />
E0 = 0 (FTS nicht vorhanden)<br />
E6 = 1 (Hubtisch unten)<br />
A1 = 0 (Motor 1 aus)<br />
S HT hoch 1<br />
E5 = 1 (Hubtisch oben)<br />
S<br />
E1 = 0<br />
E2 = 1 (VW ist angefahren)<br />
S<br />
E3 = 1 (VW fährt ein)<br />
S<br />
E4 = 1 (VW in Endposition)<br />
S<br />
S<br />
E6 = 1 (VW unten)<br />
VW langsam 1<br />
VW schnell 1<br />
VW Langsam 1<br />
VW stop<br />
1<br />
HT runter 2<br />
S RB ein<br />
1<br />
S DT-RB ein<br />
2<br />
E10 = 1 (Palette auf Drehtisch)<br />
Schritt<br />
S RB stop<br />
1<br />
7 S DT-RB aus<br />
2<br />
S DT-Antrieb ein 3<br />
E8 = 1 (Drehtisch gedreht 90°)<br />
Schritt<br />
S DT-Antrieb aus 1<br />
8 S DT-RB ein 2<br />
Bild Abb. Abb. 4.1.3.2 3.2<br />
4.2 Beispiel eines Schrittkettenablaufes<br />
Legende<br />
HT = Hubtisch<br />
VW = Verfahrwagen<br />
RB = Rollenbahn<br />
DT = Drehtisch<br />
IT für Intralogistiksysteme Prof. Dr.-Ing. Frank Thomas Seite 9