Infoblatt zu STAB2D Eingabe des Systems - am Institut für Baustatik
Infoblatt zu STAB2D Eingabe des Systems - am Institut für Baustatik
Infoblatt zu STAB2D Eingabe des Systems - am Institut für Baustatik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
BAUSTATIK<br />
<strong>Infoblatt</strong> <strong>zu</strong> <strong>STAB2D</strong><br />
Karlsruher <strong>Institut</strong> <strong>für</strong> Technologie<br />
<strong>Institut</strong> <strong>für</strong> <strong>Baustatik</strong><br />
Prof. Dr.–Ing. W. Wagner<br />
Die angebotenen Hausarbeiten in <strong>Baustatik</strong> sollen neben der eigenen Handrechnung <strong>zu</strong>sätzlich<br />
mit <strong>STAB2D</strong> bearbeitet werden. Dabei kann jeder Schritt der Handrechnung mit <strong>STAB2D</strong> kontrolliert<br />
werden.<br />
Grundlegende Information <strong>zu</strong>m Vorgehen bei der <strong>Eingabe</strong> eines statischen <strong>Systems</strong> und einzelner<br />
spezieller Bauteile (z.B. Federn), sowie Möglichkeiten der Kontrolle sind in dieser Zus<strong>am</strong>menfassung<br />
gegeben.<br />
<strong>Eingabe</strong> <strong>des</strong> <strong>Systems</strong><br />
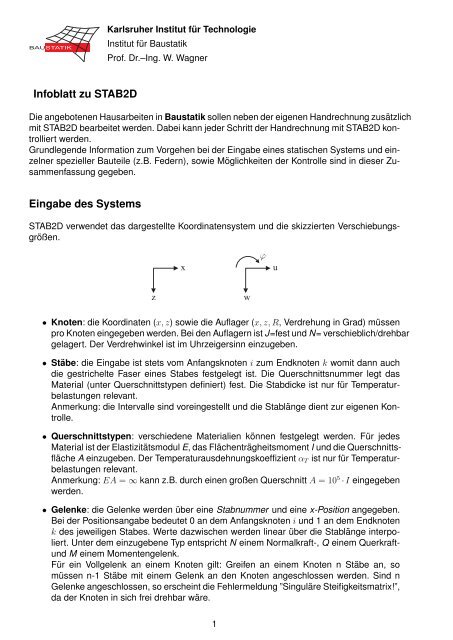
<strong>STAB2D</strong> verwendet das dargestellte Koordinatensystem und die skizzierten Verschiebungsgrößen.<br />
z<br />
x<br />
• Knoten: die Koordinaten (x, z) sowie die Auflager (x, z, R, Verdrehung in Grad) müssen<br />
pro Knoten eingegeben werden. Bei den Auflagern ist J=fest und N= verschieblich/drehbar<br />
gelagert. Der Verdrehwinkel ist im Uhrzeigersinn ein<strong>zu</strong>geben.<br />
• Stäbe: die <strong>Eingabe</strong> ist stets vom Anfangsknoten i <strong>zu</strong>m Endknoten k womit dann auch<br />
die gestrichelte Faser eines Stabes festgelegt ist. Die Querschnittsnummer legt das<br />
Material (unter Querschnittstypen definiert) fest. Die Stabdicke ist nur <strong>für</strong> Temperaturbelastungen<br />
relevant.<br />
Anmerkung: die Intervalle sind voreingestellt und die Stablänge dient <strong>zu</strong>r eigenen Kontrolle.<br />
• Querschnittstypen: verschiedene Materialien können festgelegt werden. Für je<strong>des</strong><br />
Material ist der Elastizitätsmodul E, das Flächenträgheitsmoment I und die Querschnittsfläche<br />
A ein<strong>zu</strong>geben. Der Temperaturausdehnungskoeffizient αT ist nur <strong>für</strong> Temperaturbelastungen<br />
relevant.<br />
Anmerkung: EA = ∞ kann z.B. durch einen großen Querschnitt A = 10 5 · I eingegeben<br />
werden.<br />
• Gelenke: die Gelenke werden über eine Stabnummer und eine x-Position angegeben.<br />
Bei der Positionsangabe bedeutet 0 an dem Anfangsknoten i und 1 an dem Endknoten<br />
k <strong>des</strong> jeweiligen Stabes. Werte dazwischen werden linear über die Stablänge interpoliert.<br />
Unter dem ein<strong>zu</strong>gebene Typ entspricht N einem Normalkraft-, Q einem Querkraftund<br />
M einem Momentengelenk.<br />
Für ein Vollgelenk an einem Knoten gilt: Greifen an einem Knoten n Stäbe an, so<br />
müssen n-1 Stäbe mit einem Gelenk an den Knoten angeschlossen werden. Sind n<br />
Gelenke angeschlossen, so erscheint die Fehlermeldung ”Singuläre Steifigkeitsmatrix!”,<br />
da der Knoten in sich frei drehbar wäre.<br />
1<br />
w<br />
u
• Federn: <strong>STAB2D</strong> bietet Federn nicht als <strong>Eingabe</strong>möglichkeit, diese müssen über Stäbe<br />
modelliert werden. Die beiden gängigen Federn sind hier dargestellt. Die linke Feder<br />
entspricht einer Wegfeder, die rechte einer Drehfeder.<br />
cF EA L<br />
c M EI<br />
Es sind jeweils das statische Modell und die Modellierung in <strong>STAB2D</strong> mit den entsprechenden<br />
Auflagern angegeben. Für Federn muss die Steifigkeit über die entsprechenden<br />
Geometrie- (L) und Querschnittswerte (E, A, I) modelliert werden.<br />
◦ Wegfedern: cF = EA<br />
L<br />
<strong>Eingabe</strong> der Belastungen<br />
L<br />
◦ Drehfedern: cM = EI<br />
L<br />
• Knotenlasten: <strong>Eingabe</strong> der Knotennummer und der da<strong>zu</strong>gehörigen Belastung in globalen<br />
Koordinaten.<br />
• Zwangsverformungen: <strong>Eingabe</strong> einer Verschiebung oder Verdrehung in globalen Koordinaten<br />
(z.B. <strong>für</strong> eine Gelenkfigur).<br />
• Streckenlasten: <strong>Eingabe</strong> durch Stabnummer, Entscheidung ob lokale (quer/längs) oder<br />
globale (x/z) Koordinaten verwendet werden sollen, sowie einen Anfangs- und Endwert<br />
der Belastung.<br />
• Einzellasten: <strong>Eingabe</strong> durch Stabnummer, Position (Wert zwischen 0 und 1) und der<br />
Belastung in lokalen Koordinaten (abhängig von der gestrichelten Faser).<br />
• Temperatur: Definiert über die Stabnummer, die Temperatur der Mittelfaser sowie die<br />
Differenz der Unter- und Oberseite <strong>des</strong> Trägers.<br />
Anmerkung: die Temperaturdifferenz <strong>zu</strong>r Aufstelltemperatur ist stets <strong>zu</strong> beachten!<br />
• Gelenklasten: <strong>Eingabe</strong> über Gelenknummer, einer Last oder Verformung, und dem<br />
Wert.<br />
Beispiel einer Verformung: gegenseitige Verdrehung von 1 zweier angreifender Stäbe.<br />
• Vorspannung: Der Lastfall Vorspannung muss über Umlenkkräfte als Einzel- und Streckenlasten<br />
auf das System aufgebracht werden.<br />
Ausgabe von <strong>STAB2D</strong><br />
- Verschiebungen/Verdrehungen: die Größen der einzelnen Freiheitsgrade (Verschiebung<br />
in x-Richtung, in z-Richtung und die Verdrehung) sind an jedem Knoten <strong>für</strong> jeden<br />
angreifenden Stab in der Biegelinie angegeben.<br />
- Schnittgrößen: die Zustandslinien <strong>für</strong> Normalkraft, Querkraft und das Biegemoment<br />
werden grafisch ausgegeben.<br />
2
Kontrolle von analytischen Lösungen mit <strong>STAB2D</strong><br />
• Kraftgrößenverfahren (KV): Es müssen der Last- bzw. die einzelnen Einheits<strong>zu</strong>stände<br />
eingegeben werden. Die sich einstellenden Schnittgrößenverläufe unter der jeweiligen<br />
Belastung können überprüft werden, sowie die sich ergebenden Flexibilitäten.<br />
δik ist die Verschiebung an der Stelle i infolge einer Belastung an der Stelle k.<br />
δi0 ist die Verschiebung an der Stelle i infolge der äußeren Lasten.<br />
Somit kann das ”Koppeln” der Momentenverläufe überprüft werden um etwaige Fehler<br />
<strong>zu</strong> lokalisieren. Als Kontrolle folgt aus dem ”Satz von Betti / Maxwell”, dass die Matrix<br />
der Flexibilitäten symmetrisch sein muss (δik = δki).<br />
Anmerkung <strong>zu</strong> den Arbeitskomplementen: Ist Xi eine Kraft (Moment), so sind die Flexibilitäten<br />
δik Verschiebungen (Verdrehungen). Bei Kräfte- bzw. Momentenpaaren sind<br />
es gegenseitige Verschiebungen bzw. Verdrehungen.<br />
• Einflusslinien (EL)<br />
- Kräftgrößen: es muss eine Eins-Verschiebung an der Stelle m entgegengesetzt<br />
der gesuchten Kraftgröße aufgebracht werden. Die sich einstellende Biegelinie <strong>des</strong><br />
Lastgurtes entspricht der Einflusslinie.<br />
◦ bei Auflagergrößen wird die Verschiebung als Zwangsverschiebung der Größe<br />
1 aufgebracht.<br />
◦ bei inneren Schnittgrößen wird die entsprechende Bindung gelöst (Einbau eines<br />
Gelenks) und die gegenseitige Verschiebung/Verdrehung als Gelenklast<br />
mit einer Verformung der Größe 1 aufgebracht.<br />
- Verschiebungsgrößen: es muss eine Einslast an der Stelle m in Richtung der gesuchten<br />
Verschiebungsgröße aufgebracht werden. Hieraus resultiert die Biegelinie<br />
<strong>des</strong> Lastgurtes, welche der Einflusslinie entspricht.<br />
• Verschiebungsgrößenverfahren (VV) Es muss <strong>zu</strong>erst das gegebene statische System<br />
mit den gegebenen Randbedingungen (Auflager) eingegeben werden. Anschließend<br />
werden die Auflager um die notwendigen Festhalterungen ergänzt um das geometrisch<br />
bestimmte Grundsystem <strong>zu</strong> erhalten.<br />
- Lastvektor Z 0 i : der Lastvektor ist das Arbeitskomplement der entsprechenden Verschiebungsgröße<br />
r i an der Stelle i unter den äußeren Lasten, welche als Auflagerreaktion<br />
abgelesen werden können → Z 0 i .<br />
- Steifigkeitsmatrix K k i : die Steifigkeit ist das Arbeitskomplement der entsprechenden<br />
Verschiebungsgröße r i an der Stelle i unter den Zwangsverschiebungen/verdrehungen<br />
im Einheits<strong>zu</strong>stand an der Stelle k <strong>am</strong> geom. best. Grundsystem<br />
(→ K k i ). Die K k i -Werte können als Auflagerreaktion abgelesen werden.<br />
Kontrolle: die Steifigkeitsmatrix muss symmetrisch sein (Kik = Kki).<br />
Um die Gelenkfigur <strong>zu</strong> überprüfen wird das statische System mit allen notwendigen<br />
Gelenken eingegeben. Dabei sind auch die Verschiebungsfesthalterung(en) <strong>des</strong> geom.<br />
best. Grundsystems ein<strong>zu</strong>geben. Daraufhin kann eine Zwangsverschiebung <strong>am</strong> entsprechenden<br />
Knoten der Verschiebungsfesthalterung in die entsprechende Richtung<br />
aufgebracht werden um an der sich einstellenden Verschiebungsfigur (Biegelinie) die<br />
kinematischen Werte der Knoten ab<strong>zu</strong>lesen.<br />
3