Sikkerhed i styresystemer - Jokab Safety
Sikkerhed i styresystemer - Jokab Safety Sikkerhed i styresystemer - Jokab Safety
14 Hvordan defineres en sikkerhedsfunktion? At beregne at du har opnået det PLr der kræves er ikke så svært, specielt ikke hvis du anvender ”færdigberegnede” sikkerhedsanordninger og logikenheder. Derimod er det sværere at bestemme hvilke dele der skal indgå i den respektive sikkerhedsfunktion? Dette må du løse inden du kommer til beregningstrinet. En forenklet sammenfatning er at hver sikker hedsanordning giver hver sin sikkerhedsfunktion pr. maskine som påvirkes af sikkerhedsanordningen. For tre sikkerhedsanordninger som alle bryder energien til tre maskiner i en celle giver dette altså ni sikkerhedsfunktioner. I teksten der følger forklarer vi baggrunden for dette. Flere sikkerhedsfunktioner til en maskine Til en maskine anvendes ofte flere sikkerhedsanordninger for at opnå en god og praktisk beskyttelse af operatørerne. I følgende eksempel sikres maskinen af tre sikkerhedsanordninger koblet til en logikenhed. Følgende figur illustrerer skematisk sammenkoblingen. SF1 SF2 SF3 F1 Lysgitter B1 Lågeovervågning S1 Nødstopstryk F1 Lysgitter B1 Lågeovervågning S1 Nødstopstryk SIKKERHED I STYRESYSTEMER K1 Logikenhed Flere sikkerhedsfunktioner til flere maskiner i en celle Ofte skal flere maskiner i samme celle/område sikres af flere sikkerhedsanordninger. Følgende figur illustrerer skematisk sammenkoblingen af et sådan eksempel. Hver enkelt af maskinerne Q1 – Q3 stoppes separat af logiken- K1 Logikenhed www.jokabsafety.dk Tre sikkerhedsfunktioner (SF) definieres for maskinen og beregnes således: SF1: PFH D , F1 + PFH D , K1 + PFH D , Q1 = PFH D , SF1 SF2: PFH D , B1 + PFH D , K1 + PFH D , Q1 = PFH D , SF2 SF3: PFH D , S1 + PFH D , K1 + PFH D , Q1 = PFH D , SF3 Q1 Udgang til maskine heden K1. Hvis operatøren går ind i cellen eksponeres han i dette tilfælde for samme type af risiko fra alle tre maskiner. Energien til alle tre maskiner skal afbrydes når operatøren går ind i cellen via døren der overvåges af B1. Q1 Maskine 1 Q2 Maskine 2 Q3 Maskine 3
Teoretisk tilgang ved flere maskiner Den teoretiske tilgang for beregning af sikkerhedsfunktionen er som følgende: B1 Lågeovervågning K1 Logikenhed Q1 Maskine 1 Q2 Maskine 2 For at hele sikkerhedsfunktionen bliver udført skal alle dele fungerer. Observer at hvis B1 eller K1 har en farlig fejlfunktion forsvinder hele sikkerhedsfunktionen. Hvis derimod maskine Q1 har en farlig fejlfunktion og ikke stopper så vil maskinerne Q2 og Q3 stoppe alligevel. En ulempe ved at betrakte sikkerhedsfunktionen på denne måde er også at du kan få problemer med at opnå det PL r der kræves. Men hvis du opnår det krævede PL r kan du sagtens anvende denne metode. Kilde: www.dguv.de/ifa/de/pub/grl/pdf/2009_249.pdf www.bg-metall.de/praevention/fachausschuesse/ infoblatt/deutsch.html (Nr 047, Datum 05/2010) Q3 Maskine 3 Risikovurderingen for de sikkerhedsfunktioner som krævedes imod risiciene fra robotten blev S2, F2, P2 hvilket gav PL r =e. Samme bedømmelse gjaldt for den hydrauliske presse: PL r =e. Vurderingen for den pneumatiske bearbejdningsmaskine var S2, F2, P1 hvilket gav PL r =d af den grund at man anså det for muligt at kunne undvige faren. Praktisk tilgang ved flere maskiner En mere praktisk tilgang kan være at opdele sikkerhedsfunktionen i tre, en for hver af de tre maskiner. B1 Lågeovervågning B1 Lågeovervågning B1 Lågeovervågning Denne tilgangsmåde kan give et mere retvisende billede af sikkerhedsfunktionerne når der kræves forskellig PL r for sikkerhedsfunktionerne. Hvis maskine Q1 er en robot og maskine Q2 er en transportbane der er konstrueret så den udgør ubetydelige risici så vil de forskellige PL r der kræves for at sikre imod risici fra Q1 respektivt Q2 blive forskellige. Den praktiske tilgang vil derfor være at anbefale. Tolkningen baseres på information fra IFA (Institut für Arbeitsschutz der Deutschen Gesetzlichen Unfallversicherung). For mere information om dette og andre spørgsmål henvises til kilden. Eksempel med sikkerhedsfunktioner fra praktisk eksempel 3 – sikkerheds-PLC Pluto Praktisk tilgang Hvis du anvender den praktiske tilgangsmåde ser sikkerhedsfunktionerne således ud: Robotten: PFH D , B1 + PFH D , K1 + PFH D , Q1 = 4,5 •10 -9 + 2 •10 -9 + 5,79 •10 -8 = 6,44 •10 -8 PL e Hydraulisk presse: PFH D , B1 + PFH D , K1 + PFH D , Q2 = 4,5 •10 -9 + 2 •10 -9 + 8 •10 -8 = 8,65 •10 -8 PL e Pneumatisk bearbejdningsmaskine: PFH D , B1 + PFH D , K1 + PFH D , Q3 = 4,5 •10 -9 + 2 •10 -9 + 2 •10 -7 = 2,07 •10 -7 PL d Lågeovervågningen B1, Eden, skal afbryde energien til alle maskiner i riskområdet: • Robotten Q1 (PFHD , Q1 = 5,79•10-8 ) • Hydraulisk presse Q2 (PFHD , Q2 = 8•10-8 ) • Pneumatisk bearbejdningsmaskine Q3 (PFHD , Q3 = 2•10-7 ). Samme øvelse skal gennemføres for de øvrige sikkerhedsfunktioner i cellen. For hver sikkerhedsanordning definere du de maskiner den påvirker og opretter de forskellige sikkerhedsfunktioner efter det. Teoretisk tilgang Hvordan havde det set ud hvis du havde anvendt den teoretisk tilgang? Havde sikkerhedsfunktionen opnået PL e? Samtlige maskiner: PFH D , B1 + PFH D , K1 + PFH D , Q1 + PFH D , Q2 + PFH D , Q3 = 4,5 •10 -9 + 2 •10 -9 + 5,79 •10 -8 + 8 •10 -8 + 2 •10 -7 = 3,44 •10 -7 PL d K1 Logikenhed K1 Logikenhed Q2 Maskine 2 Q1 Maskine 3 I dette tilfælde havde sikkerhedsfunktionen altså ikke opnået PL e hvilket krævedes for risiciene ved robot og hydraulisk presse. Konklusion • Anvend den praktiske tilgangsmåde. • Anvend sikkerhedsanordninger/logikenheder med høj pålidelighed (lav PFHD ) for lettest muligt at opnå det PLr som kræves. • Med Vital eller Pluto er det lettere at opnå det PLr som kræves. www.jokabsafety.dk K1 Logikenhed Q1 Maskine 1 SIKKERHED I STYRESYSTEMER 15
- Page 1 and 2: Sikkerhed i styresystemer i henhold
- Page 3 and 4: Vi udvikler innovative produkter og
- Page 5 and 6: Udføres for alle sikkerhedsfunktio
- Page 7 and 8: Kategori Strukturen for komponenten
- Page 9 and 10: Step 3 - Beregning af sikkerhedsfun
- Page 11 and 12: S1 Inca Tina S2 Smile Tina B4 Focus
- Page 13: S1 Tohåndsbetjening Safeballl Step
- Page 17 and 18: Sikkerhedsrelæ, Vital eller Pluto?
- Page 19 and 20: Proceslås Dalton holder døren ele
14<br />
Hvordan defineres en<br />
sikkerhedsfunktion?<br />
At beregne at du har opnået det PLr der kræves er ikke så svært, specielt ikke hvis du anvender ”færdigberegnede”<br />
sikkerhedsanordninger og logikenheder. Derimod er det sværere at bestemme hvilke dele der skal indgå i den respektive<br />
sikkerhedsfunktion? Dette må du løse inden du kommer til beregningstrinet. En forenklet sammenfatning er at hver<br />
sikker hedsanordning giver hver sin sikkerhedsfunktion pr. maskine som påvirkes af sikkerhedsanordningen. For tre<br />
sikkerhedsanordninger som alle bryder energien til tre maskiner i en celle giver dette altså ni sikkerhedsfunktioner. I<br />
teksten der følger forklarer vi baggrunden for dette.<br />
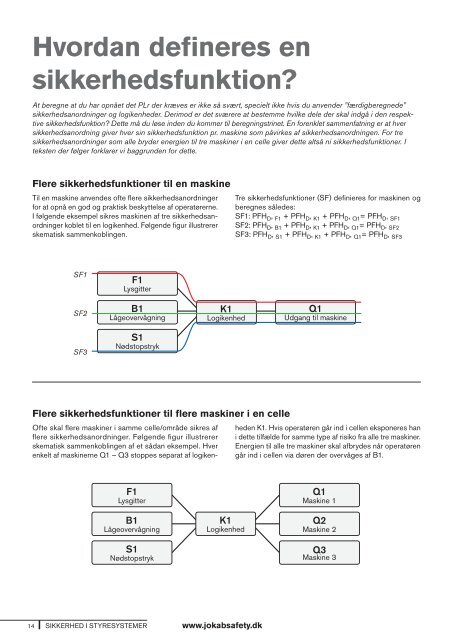
Flere sikkerhedsfunktioner til en maskine<br />
Til en maskine anvendes ofte flere sikkerhedsanordninger<br />
for at opnå en god og praktisk beskyttelse af operatørerne.<br />
I følgende eksempel sikres maskinen af tre sikkerhedsanordninger<br />
koblet til en logikenhed. Følgende figur illustrerer<br />
skematisk sammenkoblingen.<br />
SF1<br />
SF2<br />
SF3<br />
F1<br />
Lysgitter<br />
B1<br />
Lågeovervågning<br />
S1<br />
Nødstopstryk<br />
F1<br />
Lysgitter<br />
B1<br />
Lågeovervågning<br />
S1<br />
Nødstopstryk<br />
SIKKERHED I STYRESYSTEMER<br />
K1<br />
Logikenhed<br />
Flere sikkerhedsfunktioner til flere maskiner i en celle<br />
Ofte skal flere maskiner i samme celle/område sikres af<br />
flere sikkerhedsanordninger. Følgende figur illustrerer<br />
skematisk sammenkoblingen af et sådan eksempel. Hver<br />
enkelt af maskinerne Q1 – Q3 stoppes separat af logiken-<br />
K1<br />
Logikenhed<br />
www.jokabsafety.dk<br />
Tre sikkerhedsfunktioner (SF) definieres for maskinen og<br />
beregnes således:<br />
SF1: PFH D , F1 + PFH D , K1 + PFH D , Q1 = PFH D , SF1<br />
SF2: PFH D , B1 + PFH D , K1 + PFH D , Q1 = PFH D , SF2<br />
SF3: PFH D , S1 + PFH D , K1 + PFH D , Q1 = PFH D , SF3<br />
Q1<br />
Udgang til maskine<br />
heden K1. Hvis operatøren går ind i cellen eksponeres han<br />
i dette tilfælde for samme type af risiko fra alle tre maskiner.<br />
Energien til alle tre maskiner skal afbrydes når operatøren<br />
går ind i cellen via døren der overvåges af B1.<br />
Q1<br />
Maskine 1<br />
Q2<br />
Maskine 2<br />
Q3<br />
Maskine 3


