

Bilag 1: Helikopterens fysiske egenskaber - SmartData
Bilag 1: Helikopterens fysiske egenskaber - SmartData
Bilag 1: Helikopterens fysiske egenskaber - SmartData

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
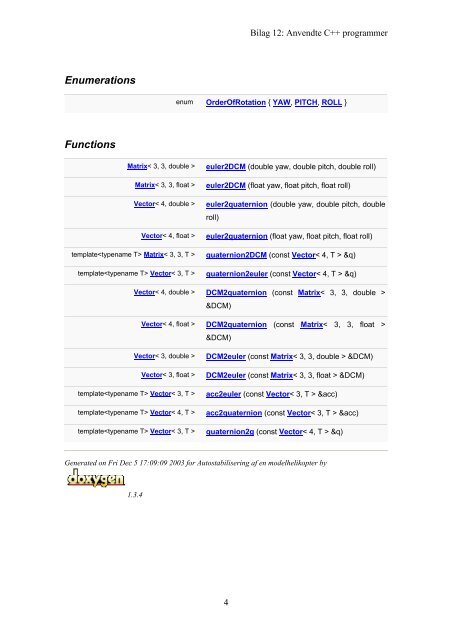
Enumerations<br />
Functions<br />
4<br />
<strong>Bilag</strong> 12: Anvendte C++ programmer<br />
enum OrderOfRotation { YAW, PITCH, ROLL }<br />
Matrix< 3, 3, double > euler2DCM (double yaw, double pitch, double roll)<br />
Matrix< 3, 3, float > euler2DCM (float yaw, float pitch, float roll)<br />
Vector< 4, double > euler2quaternion (double yaw, double pitch, double<br />
roll)<br />
Vector< 4, float > euler2quaternion (float yaw, float pitch, float roll)<br />
template Matrix< 3, 3, T > quaternion2DCM (const Vector< 4, T > &q)<br />
template Vector< 3, T > quaternion2euler (const Vector< 4, T > &q)<br />
Vector< 4, double > DCM2quaternion (const Matrix< 3, 3, double ><br />
&DCM)<br />
Vector< 4, float > DCM2quaternion (const Matrix< 3, 3, float ><br />
&DCM)<br />
Vector< 3, double > DCM2euler (const Matrix< 3, 3, double > &DCM)<br />
Vector< 3, float > DCM2euler (const Matrix< 3, 3, float > &DCM)<br />
template Vector< 3, T > acc2euler (const Vector< 3, T > &acc)<br />
template Vector< 4, T > acc2quaternion (const Vector< 3, T > &acc)<br />
template Vector< 3, T > quaternion2g (const Vector< 4, T > &q)<br />
Generated on Fri Dec 5 17:09:09 2003 for Autostabilisering af en modelhelikopter by<br />
1.3.4













